
Velodyne poll() timeout [closed]
I use Velodyne (HDL-64E_S3) laser scanner to connect my computer which is installed ROS-indigo. I have clone the code from github and modified the parameters. It can run in ROS. However, some problems have arisen when I run $ rosrun velodyne_driver velodyne_node
$ rosrun velodyne_driver velodyne_node
[INFO] [1514967205.591444624]: Velodyne HDL-64E_S3 rotating at 600 RPM
[INFO] [1514967205.592894474]: publishing 348 packets per scan
[INFO] [1514967205.602658630]: Reconfigure Request
[INFO] [1514967205.604388639]: expected frequency: 9.976 Hz
[INFO] [1514967205.605870005]: Opening UDP socket: port 2368
[WARN] [1514967206.609322625]: Velodyne poll() timeout
I don't what happened.Could you tell me how to do it? Thank you.
The following is my supplementary test content.
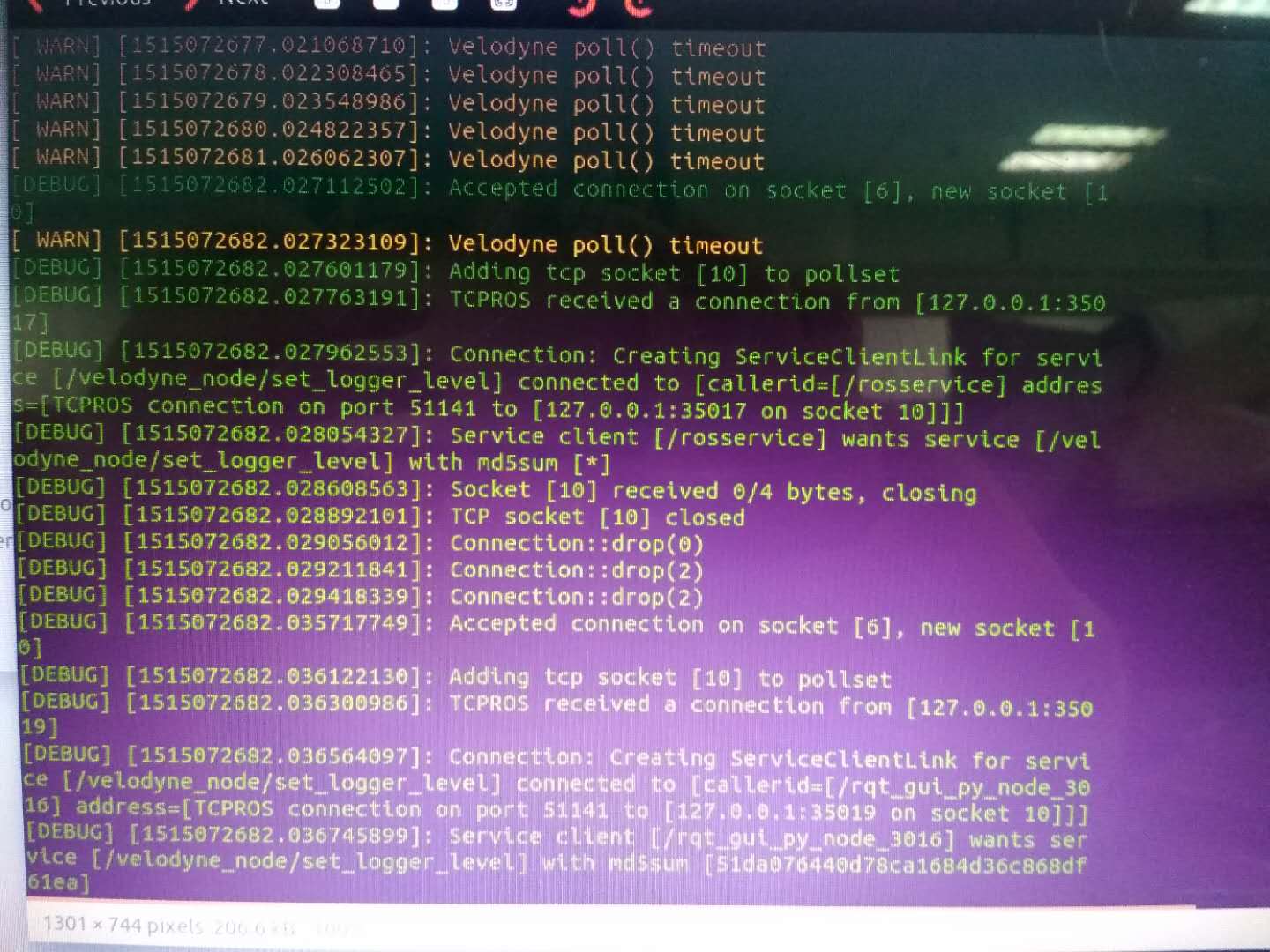
Once again, I verified that the laser whether if connected to the computer, however, it does not. I ran rqt_logger_level, the terminal shows DEBUG (as shown below) and it just received the socket package from 127.0.0.1 and not from 192.168.3.43. And I was experimenting with WiFi turned off and only working with Ethernet(laser working network). From the picture you can see I actually received TCP socket.
 Please forgive my bad photo technology
Please forgive my bad photo technology

this maybe the laser cann't connect computer. But, ip address is right source ip address: 192.168.3.43 destination ip address : 192.168.3.255
What code did you decide to modify?
You can see it at https://github.com/wawaafan/velodyne/... . I just modified driver.cc file and added 64e_points.launch in velodyne_pointcloud/launch file. I also modified some launch file which include "model" parameters, replaceing 64E with 64E_S3.
At first glance, those look like useful additions. You might consider submitting a pull request.
Do you know how to solve it? I have no idea. It is about to drive me crazy. Thank you.
Can you see the packets with wireshark?
Is there any problem with my program or my computer?
All of the TCP packets you're seeing on 127.0.0.1 look like internal network traffic from ROS and probably aren't from your laser. I don't see any packets in your captures from the IP address you list, so I suspect that either your network interface settings or your wireshark settings are incorrect.