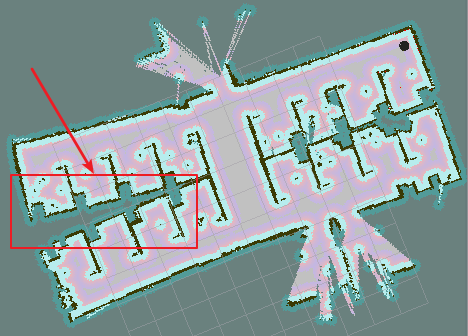
To me it looks like the laser scanner is working well, but the ODOM drift is too high, so the robot loses it's sense of direction over time.
Can I assume your robot has wheel encoders?
If it does, you should redo the calibration, especially for encoder counts on each wheel during rotating.
If your odom is based on a calculation of counts and wheel measurements, I suggest instead you determine the counts/meter and counts/radian through measurement instead of calculating. See section 1.2 of this: http://wiki.ros.org/navigation/Tutori...
Once you are confident in the calibration, remap and make sure any rotation during mapping is done very slowly.