
Gazebo spawning model incorrectly.
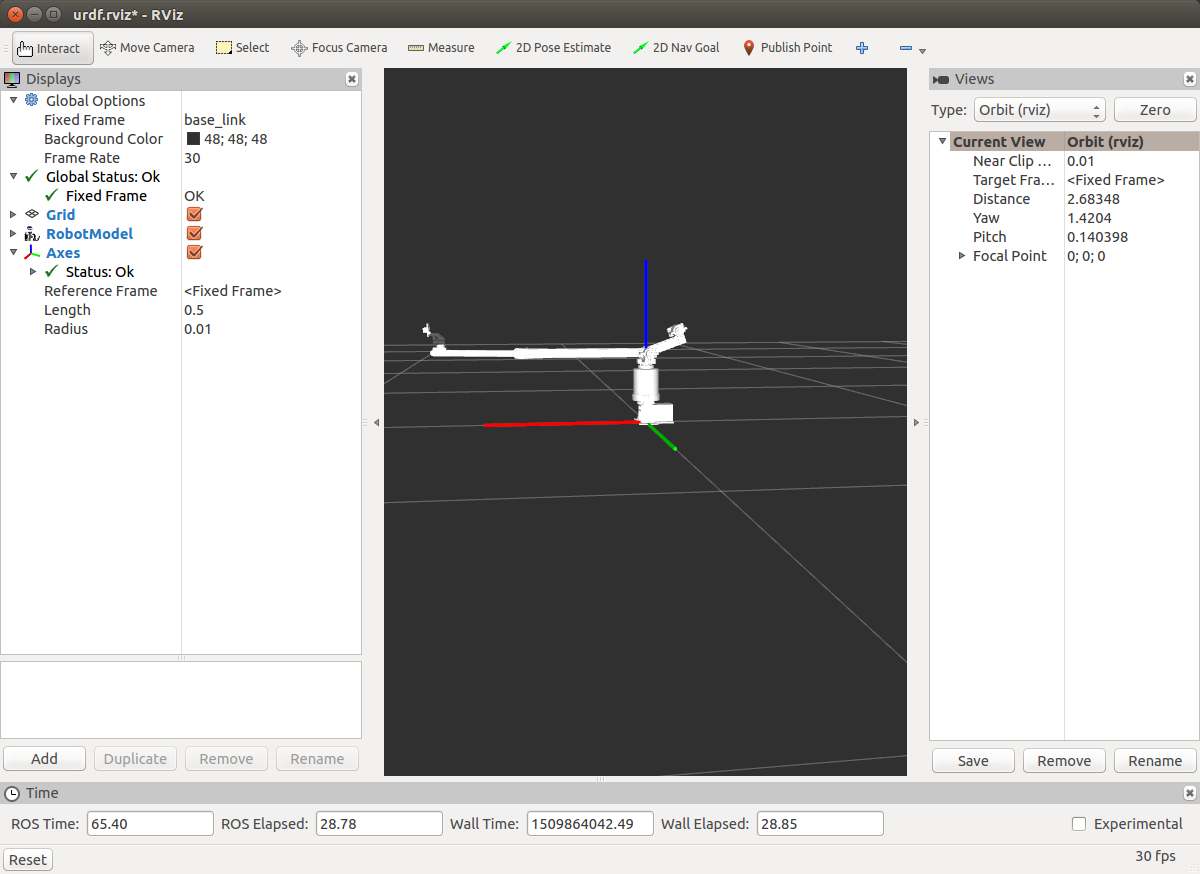
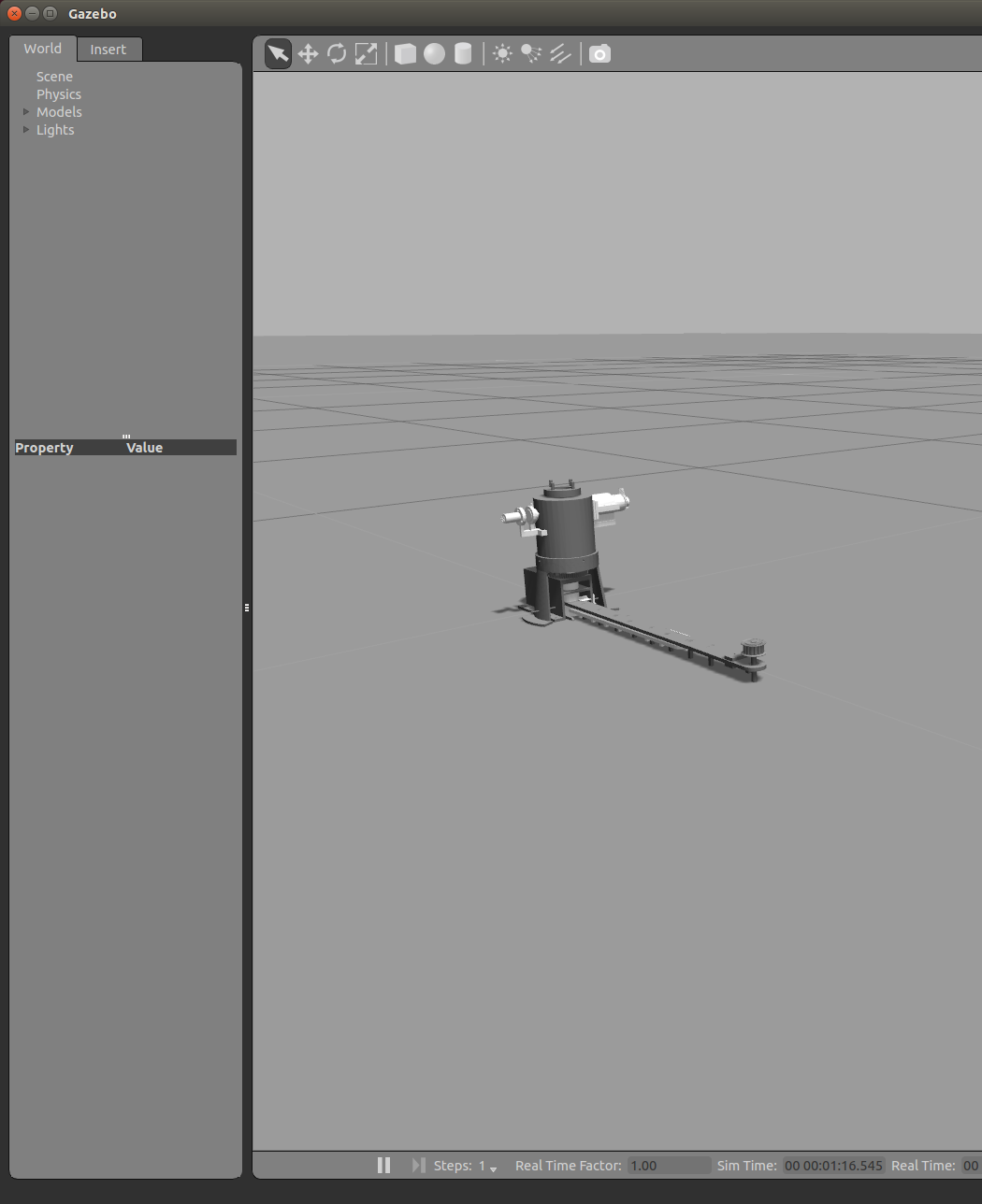
I am trying to import a custom robot into gazebo. I designed it in solidworks, used the urdf converter and copied the package into the ROS workspace. The robot appears just fine in Rviz and all the joints are working they way they're supposed to. However, when I run the launch file for gazebo, the robot spawns as show in the figure below. I don't know what could be causing that kind of behaviour. I'm using ROS Indigo with Gazebo 2.2.6.
Thanks in advance
Here's the urdf file if anyone wants to take a look.
<robot name="manipulator" xmlns:xacro="http://www.ros.org/wiki/xacro">
<xacro:include filename="$(find manipulator)/urdf/manipulator.gazebo"/>
<link name="world"/>
<joint name="fix" type="fixed">
<parent link="world"/>
<child link="base_link"/>
</joint>
<link name="base_link">
<inertial>
<origin xyz="-0.018218 3.767E-08 0.066046" rpy="0 0 0"/>
<mass value="1.1901"/>
<inertia ixx="0.0020853" ixy="-8.1652E-10" ixz="-0.00068251" iyy="0.002344" iyz="6.9296E-10" izz="0.00025871"/>
</inertial>
<visual>
<origin xyz="0 0 0" rpy="0 0 0"/>
<geometry>
<mesh filename="package://manipulator/meshes/base_link.STL"/>
</geometry>
<material name="">
<color rgba="0.75294 0.75294 0.75294 1"/>
</material>
</visual>
<collision>
<origin xyz="0 0 0" rpy="0 0 0"/>
<geometry>
<mesh filename="package://manipulator/meshes/base_link.STL"/>
</geometry>
</collision>
</link>
<link name="link1">
<inertial>
<origin xyz="-1.7313E-06 0.016337 0.1197" rpy="0 0 0"/>
<mass value="0.18815"/>
<inertia ixx="0.00035983" ixy="1.5974E-08" ixz="9.0583E-09" iyy="0.00021667" iyz="-7.3319E-05" izz="0.00014318"/>
</inertial>
<visual>
<origin xyz="0 0 0" rpy="0 0 0"/>
<geometry>
<mesh filename="package://manipulator/meshes/link1.STL"/>
</geometry>
<material name="">
<color rgba="0.75294 0.75294 0.75294 1"/>
</material>
</visual>
<collision>
<origin xyz="0 0 0" rpy="0 0 0"/>
<geometry>
<mesh filename="package://manipulator/meshes/link1.STL"/>
</geometry>
</collision>
</link>
<joint name="waist" type="revolute">
<origin xyz="0 0 0.0705" rpy="-2.8368E-15 2.3227E-18 0.0008188"/>
<parent link="base_link"/>
<child link="link1"/>
<axis xyz="0 0 1"/>
<limit lower="-3.14" upper="3.14" effort="2.8" velocity="1.1"/>
</joint>
<link name="link2">
<inertial>
<origin xyz="0.098154 0.02219 -0.00049839" rpy="0 0 0"/>
<mass value="0.2538"/>
<inertia ixx="0.000289" ixy="0.00092316" ixz="0.00012104" iyy="0.0057134" iyz="-1.4321E-05" izz="0.0058253"/>
</inertial>
<visual>
<origin xyz="0 0 0" rpy="0 0 0"/>
<geometry>
<mesh filename="package://manipulator/meshes/link2.STL"/>
</geometry>
<material name="">
<color rgba="0.75294 0.75294 0.75294 1"/>
</material>
</visual>
<collision>
<origin xyz="0 0 0" rpy="0 0 0"/>
<geometry>
<mesh filename="package://manipulator/meshes/link2.STL"/>
</geometry>
</collision>
</link>
<joint name="shoulder" type="revolute">
<origin xyz="0 0 0.1475" rpy="1.5708 1.0989E-14 1.0298E-13"/>
<parent link="link1"/>
<child link="link2"/>
<axis xyz="0 0 1"/>
<limit lower="-0.13" upper="1.11" effort="2.8" velocity="1.1"/>
</joint ...
Hey did you figure it out? Maybe you remember what you did, having a similar issue with my URDF to gazebo