
How to resize meshes in URDF?

I am currently drawing out my robot using URDF. I am at the end of the first URDF tutorial (see http://wiki.ros.org/urdf/Tutorials/Bu... ). My problem: once I added my mesh, it is very disproportionate to the rest of the drawing, and I have no idea how to resize the mesh. The tutorial states that: "Meshes can also be sized using relative scaling parameters or a bounding box size"
where do I find an example? Where is the documentation? and if no documentation or examples exist, could you please provide an example of code for a "bounding box" or "relative scaling"?
More detail:
image before meshes are added in urdf file:

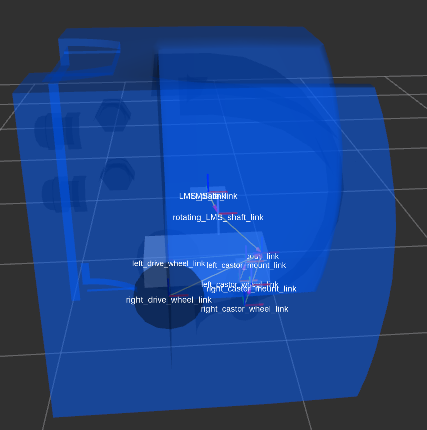
image after meshes are added in urdf file:
the code importing the meshes:
<!-- *********************(21) LMS LINK - MESHES****************************-->
<!-- a "link" is the part that we are creating. All the internal tags describe
this part. This is the body of Jimmy (both square levels) -->
<link name="LMS_link">
<visual>
<geometry>
<!--box dimensions is Meters. L X W X H where the L X H is a rectangle,
and the H extrudes it upwards -->
<mesh filename="package://urdf_tutorial/meshes/LMS-200-30106.dae"/>
</geometry>
<origin rpy="0 0 0" xyz="0 0 0"/>
<material name="white"/>
</visual>
</link>
<!-- *********************(22) LMS to LMS PLATE JOINT **********************-->
<!-- a joint allows us to create a relationship between two links (parts)-->
<joint name="LMS_to_LMS_plate_joint" type="fixed">
<parent link="LMS_plate_link"/>
<child link="LMS_link"/>
<!-- this is the point at which the two parts attach to one another-->
<origin xyz="0 0 0"/>
</joint>
I am building a URDF because it was suggested here: https://answers.ros.org/question/2718...


@BuilderMike: please attach your images to your question directly. I've given you enough karma to do that.
Also: I would advise you follow regular ROS Naming conventions when naming
links andjoints as well. In summary: no capitals, anywhere, no whitespace, no special chars.@gvdhoorn Thanks for the karma, I updated all my questions to include images instead of links. Also, thank you for the link to the URDF XML wiki.... I missed it when reading the tutorial. As for the naming convention, thanks for pointing out my error. Is there a document outlining these conventions?
re: conventions: I think I linked you to those ("ROS Naming conventions").
If you're looking for joint/link/frame naming conventions, there is geometry/CoordinateFrameConventions, but it's not too explicit.
No capitals or special chars ..
.. and no whitespace just makes sense: no guessing as to how someone CaPiTaLiseD their frames, no weird international char / localisation issues, etc.
I always follow wiki/Names with everything (files, directories, xacros, etc).