
RViz display's model incorrectly on Ubuntu 17.04 but does it corret on 16.04.3 LTS
I'm currentliy working on Ubuntu 17.04 and I'm having problems with RViz not displaying urdf models correctly. I startet to elaborate the problem in my previous post. This is now the second attempt. But I'll start from the beginning ...
What I did so far: I just installed Ubuntu and ROS with apt-get and tried to start the urdf_tutorial visualization. Everthing needed to do this has been shiped with the ROS packages for Ubuntu. So when I run
roslaunch urdf_tutorial display.launch
I get the following screen
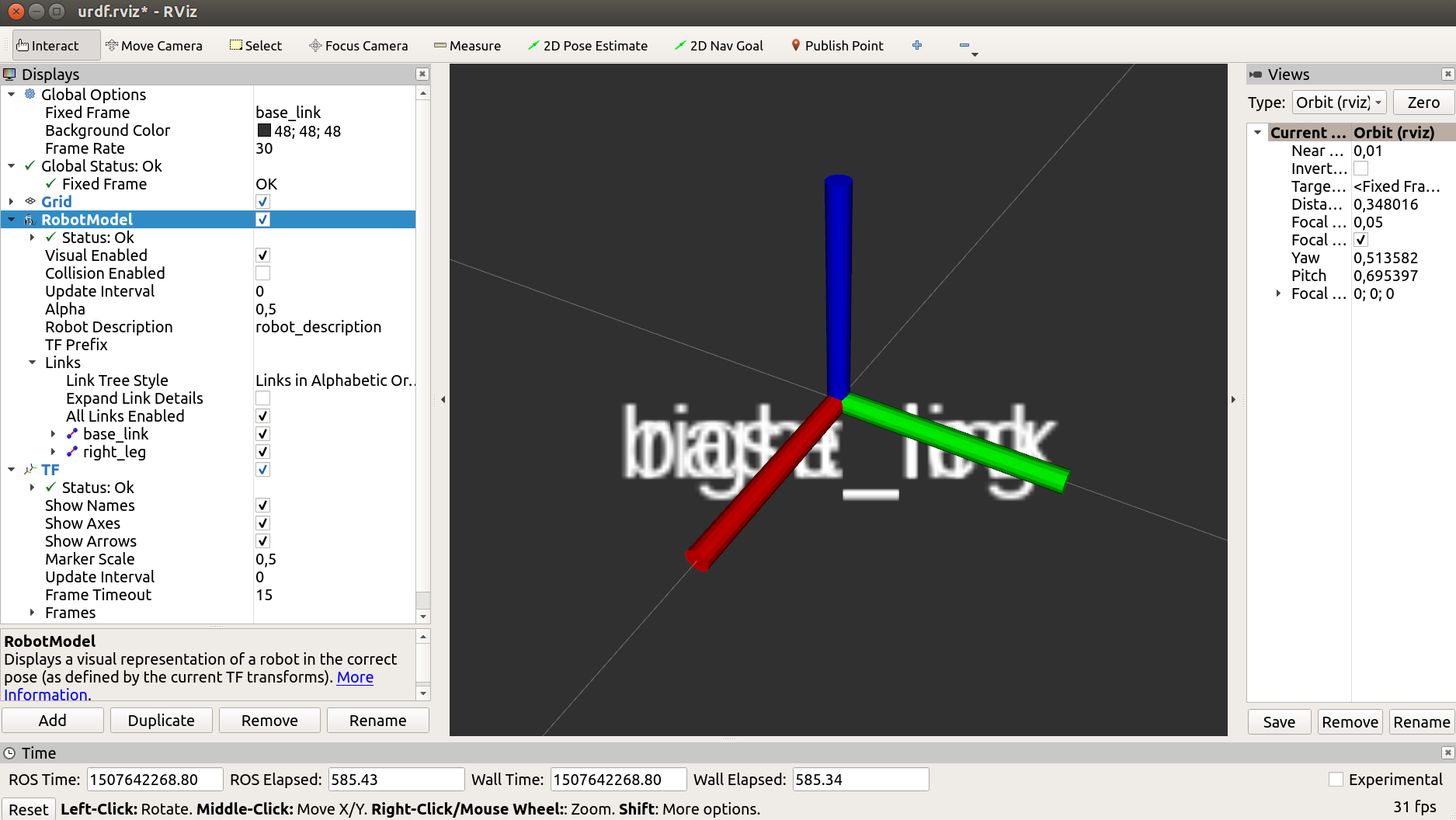
It can be seen that the model is not whown, only a link (or whatever this this). In order fo find out if this problem is related to Ubuntu 17.04 I installed Ubuntu 16.04.3 LTS in a VM and did the same, installed ROS!
When I perform the same command
roslaunch urdf_tutorial display.launch
I get the following (correct) screen
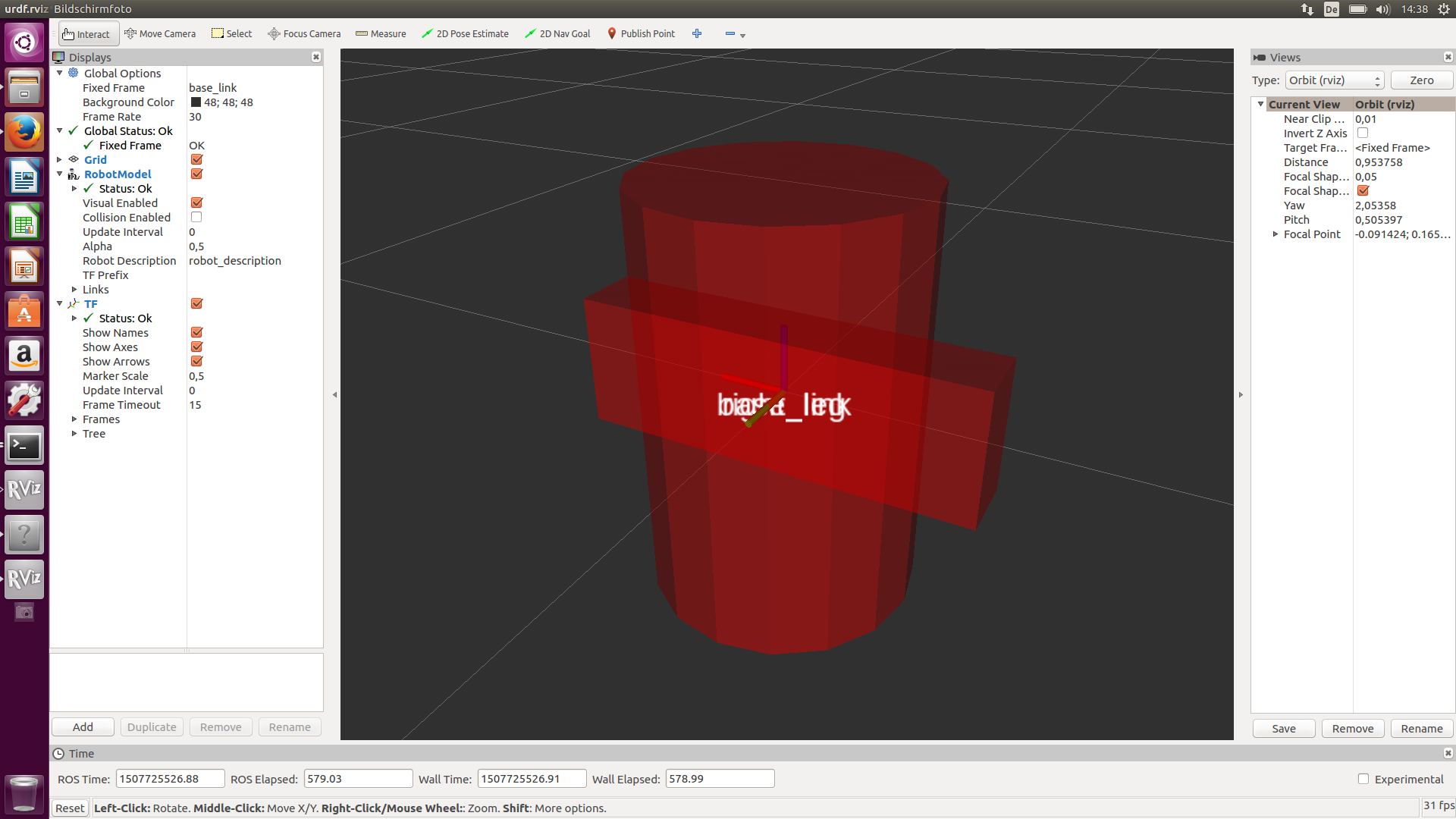
In my optinion this is somehow related to Ubuntu. I also checked the loaded urdf models which are equal for both attempts.
rosparam get /robot_description
Output on Ubuntu 17.04
"<?xml version=\"1.0\" ?>\n<!-- ===================================================================================\
\ -->\n<!-- | This document was autogenerated by xacro from /opt/ros/lunar/share/urdf_tutorial/urdf/02-multipleshapes.urdf\
\ | -->\n<!-- | EDITING THIS FILE BY HAND IS NOT RECOMMENDED \
\ | -->\n<!-- ===================================================================================\
\ -->\n<robot name=\"multipleshapes\">\n <link name=\"base_link\">\n <visual>\n\
\ <geometry>\n <cylinder length=\"0.6\" radius=\"0.2\"/>\n </geometry>\n\
\ </visual>\n </link>\n <link name=\"right_leg\">\n <visual>\n <geometry>\n\
\ <box size=\"0.6 0.1 0.2\"/>\n </geometry>\n </visual>\n </link>\n\
\ <joint name=\"base_to_right_leg\" type=\"fixed\">\n <parent link=\"base_link\"\
/>\n <child link=\"right_leg\"/>\n </joint>\n</robot>\n\n"
Output on Ubuntu 16.04.03 LTS
"<?xml version=\"1.0\" ?>\n<!-- ===================================================================================\
\ -->\n<!-- | This document was autogenerated by xacro from /opt/ros/lunar/share/urdf_tutorial/urdf/02-multipleshapes.urdf\
\ | -->\n<!-- | EDITING THIS FILE BY HAND IS NOT RECOMMENDED \
\ | -->\n<!-- ===================================================================================\
\ -->\n<robot name=\"multipleshapes\">\n <link name=\"base_link\">\n <visual>\n\
\ <geometry>\n <cylinder length=\"0.6\" radius=\"0.2\"/>\n </geometry>\n\
\ </visual>\n </link>\n <link name=\"right_leg\">\n <visual>\n <geometry>\n\
\ <box size=\"0.6 0.1 0.2\"/>\n </geometry>\n </visual>\n </link>\n\
\ <joint name=\"base_to_right_leg\" type=\"fixed\">\n <parent link=\"base_link\"\
/>\n <child link=\"right_leg\"/>\n </joint>\n</robot>\n\n"
I also compared the content of the display tab (on the left side) for both attempts but I did not notice any diffence in the key / values.
Any suggestion on how to solve the problem ? Downgrading is not an option because my workstation also does not run with Ubuntu 16.04 nativeley only with 17.04 (maybe the hardwware is to new)

This could be caused by locale settings. See ros-visualization/rviz#1151.