How to implement open package to my robot?
Hi, I am not that good at ROS
I want to implement rrt_package(rrt_exploration, rrt_exploration_tutorial) to my (turtlebot3 robot). The rrt package is based on kobuki robot so I thought it is necessary to remap topic names in the rrt_package with the topic names what turtlebot3 uses. I made some launch files based on the turtlebot3_model.launch file in the turtlebot3_bringup package and I have included some scripts from the single_simulated_house.launch in the rrt_exploration_tutorial package.
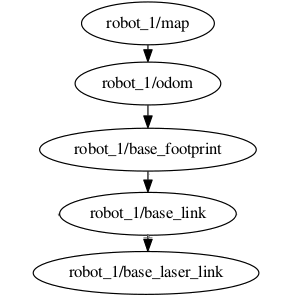
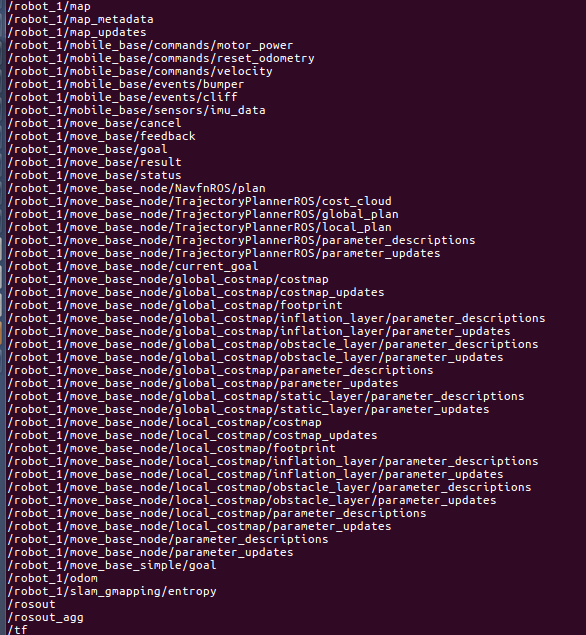
I expected my turtlebot3 robot to operate like here but it was not. Master(desktop) did not seem to receive scan data from turtlebot3. Turtlebot3 works well when starting the turtlebot3 package, so it is free from defects.
Bellow are my launch files.
Main launch file: turtlebot3 bring up launch(based on turtlebot3_model.launch in turtlebot3_bringup package)
<launch>
<!--group ns="/robot_1"-->
<arg name="model" default="$(env TURTLEBOT3_MODEL)" doc="model type [burger, waffle]"/>
<include file="$(find turtlebot3_bringup)/launch/includes/turtlebot3_rrt_robot_description.launch.xml">
<arg name="model" value="$(arg model)" />
</include>
<node pkg="robot_state_publisher" type="robot_state_publisher" name="robot_state_publisher" output="screen">
<param name="publish_frequency" type="double" value="50.0" />
<param name="use_tf_static" type="bool" value="false" />
<param name="tf_prefix" type="string" value="$(arg model)"/>
</node>
<include file="$(find turtlebot3_bringup)/launch/includes/rrt.launch">
<!--arg name="namespace" value="robot_1"/-->
</include>
<!--/group-->
<node name="rviz" pkg="rviz" type="rviz" args="-d $(find turtlebot3_description)/rviz/model.rviz">
<!--node pkg="rviz" type="rviz" name="rviz" args="-d $(find rrt_exploration_tutorials)/launch/includes/rviz_config/single.rviz"-->
<!--remap from="move_base_simple/goal" to="robot_1/move_base_simple/goal"/-->
</node>
</launch>
Turtlebot3 description xml file(based on description.launch.xml in turtlebot3_bringup package)
<launch>
<arg name="model"/>
<arg name="urdf_file" default="$(find xacro)/xacro.py '$(find turtlebot3_description)/urdf/turtlebot3_$(arg model).urdf.xacro'" />
<param name="robot_description" command="$(arg urdf_file)" />
</launch>
RRT launch file(based on move_baseSafe.launch in rrt_exploration_tutorial package)
<!-- move base -->
<launch>
<master auto="start"/>
<!--arg name="namespace"/-->
<param name="use_sim_time" value="true" />
<node pkg="gmapping" type="slam_gmapping" name="slam_gmapping" output="screen" >
<remap from="scan" to="base_scan"/>
<!--param name="map_frame" value="$(arg namespace)/map"/-->
<param name="map_frame" value="map"/>
<!--param name="odom_frame" value="$(arg namespace)/odom"/-->
<param name="odom_frame" value="odom"/>
<!--param name="base_frame" value="$(arg namespace)/base_link"/-->
<param name="base_frame" value="base_link"/>
<param name="map_update_interval" value="2.0"/>
<param name="maxUrange" value="50.0"/>
<param name="maxRange" value="50.0"/>
<param name="sigma" value="0.05"/>
<param name="kernelSize" value="1"/>
<param name="lstep" value="0.05"/>
<param name="astep" value="0.05"/>
<param name="iterations" value="5"/>
<param name="lsigma" value="0.075"/>
<param name="ogain" value="3.0"/>
<param name="lskip" value="0"/>
<param name="srr" value="0.01"/>
<param name="srt" value="0.02"/>
<param name="str" value="0.01"/>
<param name="stt" value="0.02"/>
<param name="linearUpdate" value="0.01"/>
<param name="angularUpdate" value="0.01"/>
<param name="temporalUpdate" value="0.1"/>
<param name="resampleThreshold" value="0.5"/>
<param name="particles" value="30"/>
<param name="xmin" value="-5.0"/>
<param name="ymin" value="-5.0"/>
<param name="xmax" value="5.0"/>
<param ...