
The site is read-only. Please transition to use Robotics Stack Exchange
| ROS Resources: Documentation | Support | Discussion Forum | Index | Service Status | ros @ Robotics Stack Exchange |
| | 1 | initial version |
It should work with any robot that receives velocity commands and publishes TF, odometery, and laser scan. Turtlebot3 does all that, so it should work. However, I'm not familiar with Turtlebot3 launch files.
To get the full picture, can you please show topic names? and also your TF tree, while everything is running?
For it to work, robot node names, topics and frames, all have to be prefixed by "robot_1". One way to do that is by using
<group ns="/robot_1"> in your launch files.
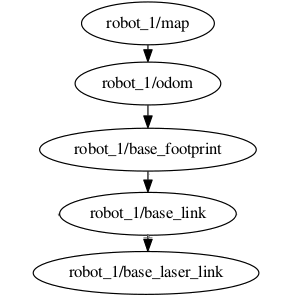
Your TF tree should look like this:
Your topic names should be like this:
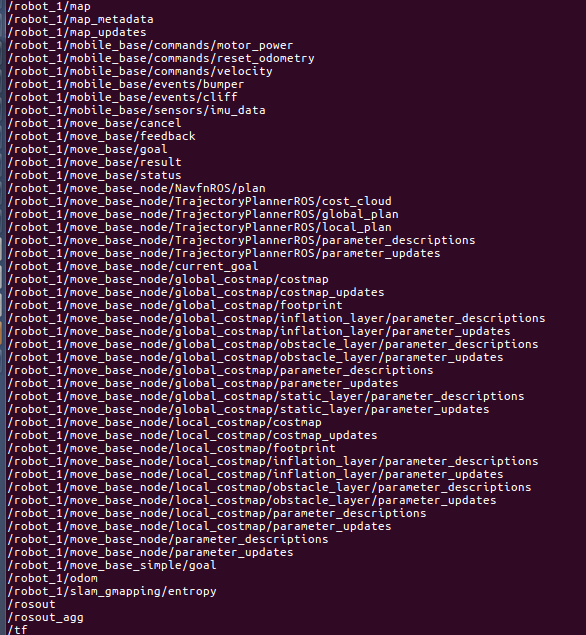
So before you run the rrt_exploration package. Make sure you get this.
I assume you are doing a simulation not on a physical robot, correct? <param name="use_sim_time" value="true" /> ?
| | 2 | No.2 Revision |
It should work with any robot that receives velocity commands and publishes TF, odometery, and laser scan. Turtlebot3 does all that, so it should work. However, I'm not familiar with Turtlebot3 launch files.
To get the full picture, can you please show topic names? and also your TF tree, while everything is running?
For it to work, robot node names, topics and frames, all have to be prefixed by "robot_1". One way to do that is by using
<group ns="/robot_1"> in your launch files.
Your TF tree should look like this:
Your topic names should be like this:
So before you run the rrt_exploration package. Make sure you get this.
I assume ====================================================
Since you are doing a simulation not on using a physical robot, correct? <param name="use_sim_time" value="true" /> ?
false. In your launch files you removed everything related to "robot_1" namespace, this is wrong, everything (node names, topics and frames in TF) should be prefixed by "robot_1". This is why the move_baseSafe.launch takes the namespace as an argument.
| | 3 | No.3 Revision |
It should work with any robot that receives velocity commands and publishes TF, odometery, and laser scan. Turtlebot3 does all that, so it should work. However, I'm not familiar with Turtlebot3 launch files.
To get the full picture, can you please show topic names? and also your TF tree, while everything is running?
For it to work, robot node names, topics and frames, all have to be prefixed by "robot_1". One way to do that is by using
<group ns="/robot_1"> in your launch files.
Your TF tree should look like this:
Your topic names should be like this:
So before you run the rrt_exploration package. Make sure you get this.
====================================================
====================================================
Since you are using a physical robot, <param name="use_sim_time" value="true" />, this parameter should be set to false.
In your launch files you removed everything related to "robot_1" namespace, this is wrong, everything (node names, topics and frames in TF) should be prefixed by "robot_1". This is why the move_baseSafe.launch takes the namespace as an argument.
 ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.
ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.