
/odom tf out of map bounds
Hi everyone
Recently I managed to get a map using navigation stack. I mapped the room where I'm working and got this map.
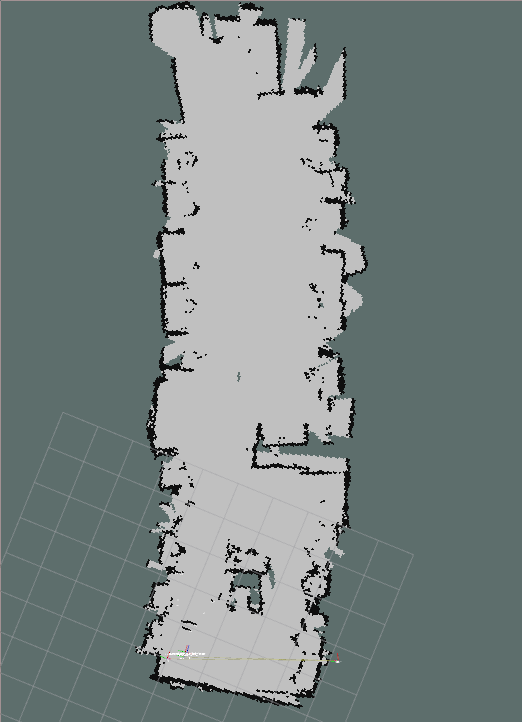
As you can see, isn't accurate at all. But is a good result considerating that is my first map.
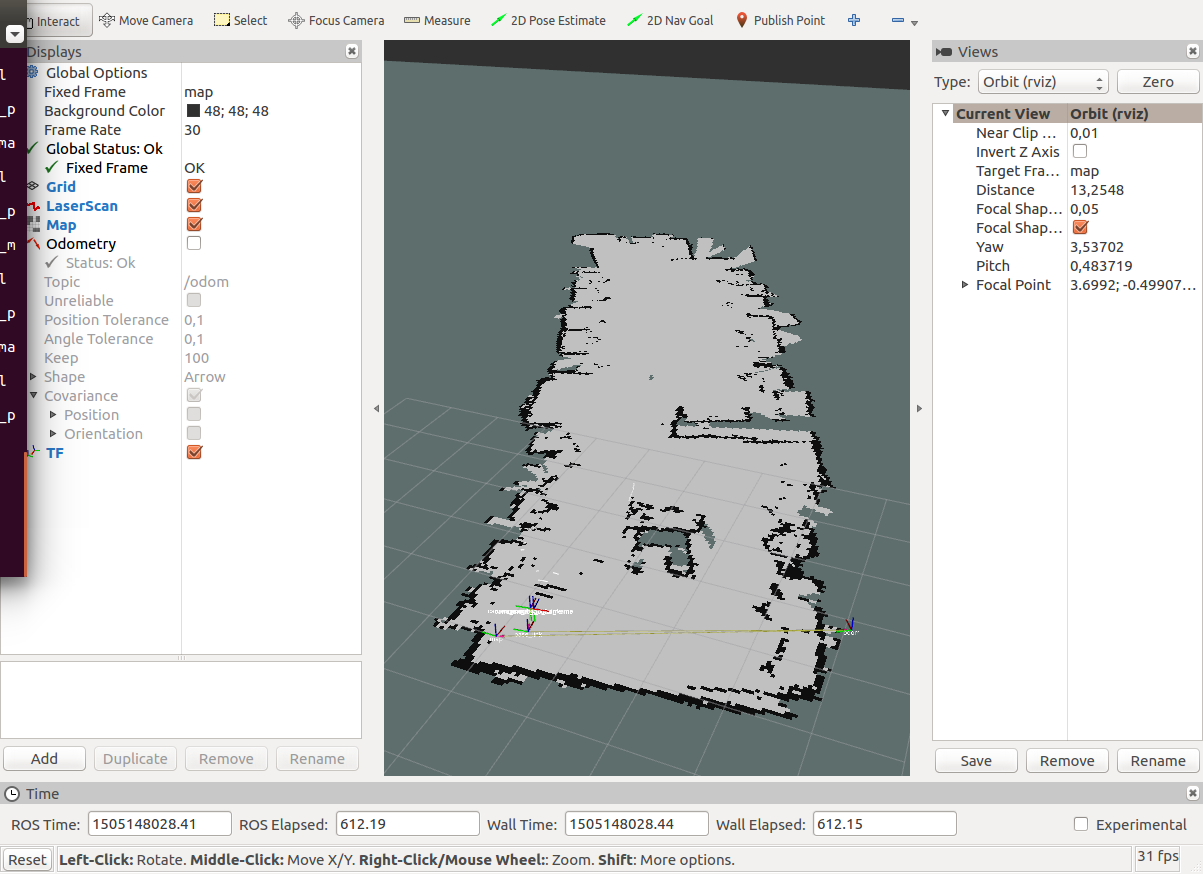
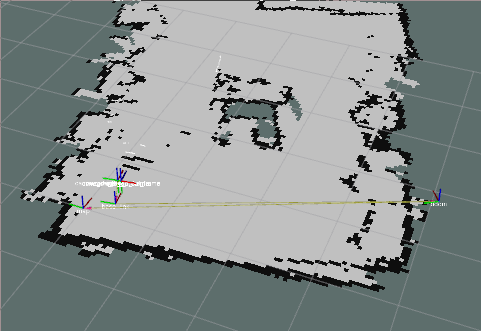
After driving around, odom tf should or shouldn't be at the same position that the robot is?
I understand that odometry by itselft isn't accurate, and for that reason gmapping uses both odometry and laser scanner inputs for doing mapping trough a particle filter. So... is it normal that odom tf position won't be the same for the robot?
Also I've tried set a 2D nav goal, just in front of the robot and it crashes all the time. Maybe because of my .yaml files configuration. Any advice?
-------------------------------> My github page <------------------------------
I'm kind of confused with my .yaml parameters, because it keep crashing. Inside one of those files there must be a mistake in the configuration.

Bad yaml configuration files should not end in a crash, any error given?
This error
The origin for the sensor at (0.13, -0.00) is out of map bounds. So, the costmap cannot raytrace for it.and after a while it increases.until -15, 3 app once I mapped.I've solved that just setting
static map: truebut I'm still crashing on the mapBetter create a bug report on github