
rtabmap with ZR300 [closed]
Hello all,
Having a little trouble with using rtabmap with ZR300. Trying to just do the hand held mapping with visual odom, but odom seems to have trouble with the environment
Error: OdometryF2M.cpp:372::computeTransform() Registration failed: "Not enough inliers 0/20 between -1 and 0"
Also, for some reason the map cloud is quite sparse (but the point cloud looks fine), despite me changing the following params:
param name="decimation" type="double" value="1"/
param name="voxel_size" type="double" value="0.0001"/
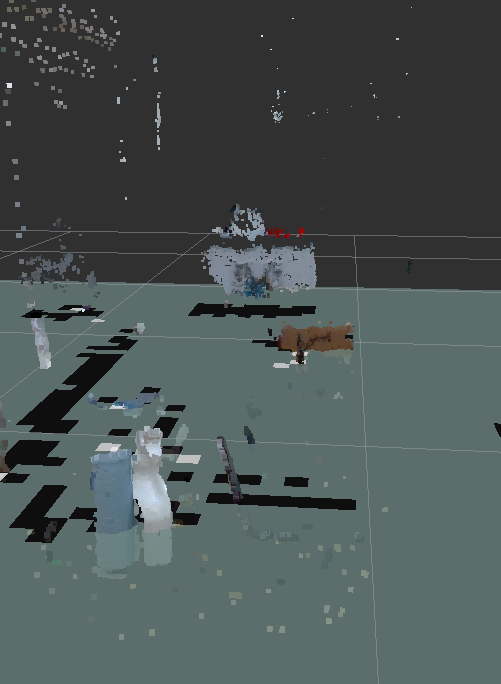
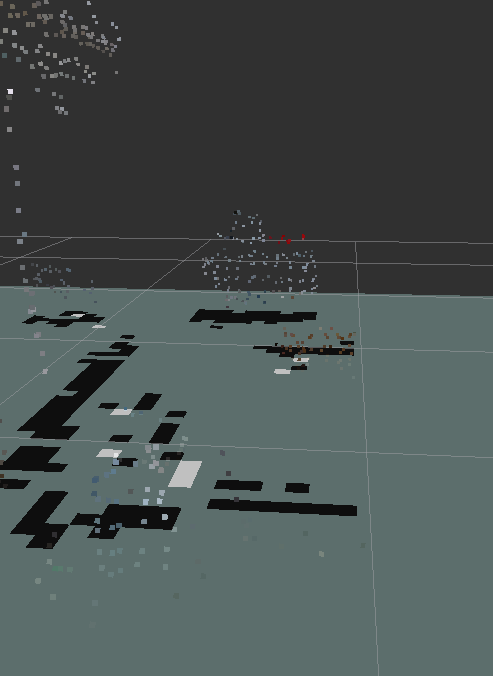
The below images show the pointcloud and the map cloud respectively
Thanks, any pointers would be a great help!

Could I ask you to please attach the images to your question instead of hosting them off-board? I've given you enough karma to do so.
yeup! Thanks!
Can you show command lines used? Did you follow instructions from this tutorial for ZR300?
Oh sorry I forgot to update. I am still not sure what I did to fix the problem, but I reinstalled and it worked. Thanks!