
teb_local_planner planning low velocity trajectories


Hi,
I am trying to use Teb local planner for my robot. But robot is moving very slow (0.1 to 0.23 m/sec) and with jerky movements. Although robot can easily go upto 1m/sec. I have tried changing value of weights but it had no impact. I have tried changing size (width and lenght) of local cost map from 8 to 20m, but it had no impact. I am using latest download for git for Kinetic version. I have also observed that sometime teb plans local trajectorise through obstacles in case of 20m x 20m size local map.
the configuration file for teb is as follows:
teb_autosize: True
dt_ref: 0.3
dt_hysteresis: 0.1
global_plan_overwrite_orientation: True
allow_init_with_backwards_motion: False
max_global_plan_lookahead_dist: 10.0 #increased lookahead from 20 to 30
feasibility_check_no_poses: 10
# Robot
max_vel_x: 1.0
max_vel_x_backwards: 0.12 #reduced from 0.2
max_vel_y: 0.0
max_vel_theta: 0.35
acc_lim_x: 0.2
acc_lim_theta: 0.20
min_turning_radius: 0.0 # diff-drive robot (can turn on place!)
footprint_model:
type: "circular"
radius: 0.35
# GoalTolerance
xy_goal_tolerance: 1
yaw_goal_tolerance: 1.2
free_goal_vel: true
# Obstacles
min_obstacle_dist: 0.1 # This value must also include our robot radius, if footprint_model is set to "point".
include_costmap_obstacles: True
costmap_obstacles_behind_robot_dist: 1.0
obstacle_poses_affected: 10
costmap_converter_plugin: ""
costmap_converter_spin_thread: True
costmap_converter_rate: 5
# Optimization
no_inner_iterations: 5
no_outer_iterations: 4
optimization_activate: True
optimization_verbose: False
penalty_epsilon: 0.1
weight_max_vel_x: 2 #5
weight_max_vel_theta: 1
weight_acc_lim_x: 1 #1
weight_acc_lim_theta: 1
weight_kinematics_nh: 100 #100
weight_kinematics_forward_drive: 1 #1
weight_kinematics_turning_radius: 1
weight_optimaltime: 1
weight_obstacle: 50
weight_dynamic_obstacle: 10 # not in use yet
weight_adapt_factor: 2
costmap_common_params.yaml:
#---(in meters)---
robot_radius: 0.35
footprint_padding: 0.05
transform_tolerance: 1.5
map_type: costmap
obstacle_layer:
enabled: true
# expected_update_rate: 0.05 #enough margin for 50Hz laser
obstacle_range: 10.0
raytrace_range: 10.0
inflation_radius: 0.25
track_unknown_space: false
combination_method: 1
inf_is_valid: true
observation_sources: laser_scan_sensor
laser_scan_sensor: {data_type: LaserScan, topic: scan, marking: true, clearing: true}
inflation_layer:
enabled: true
cost_scaling_factor: 10.0 # exponential rate at which the obstacle cost drops off (default: 10)
inflation_radius: 0.25 # max. distance from an obstacle at which costs are incurred for planning paths.
static_layer:
enabled: true
map_topic: "map"
Local costmap params:
local_costmap:
global_frame: map
robot_base_frame: base_link
update_frequency: 10.0
publish_frequency: 1.0
static_map: false
rolling_window: true
width: 8
height: 8
resolution: 0.05
transform_tolerance: 0.5
plugins:
# - {name: static_layer, type: "costmap_2d::StaticLayer"}
- {name: obstacle_layer, type: "costmap_2d::ObstacleLayer"}
- {name: inflation_layer, type: "costmap_2d::InflationLayer"}
global costmap params:
global_costmap:
global_frame: map
robot_base_frame: base_link
update_frequency: 0.25
publish_frequency: 0.5
static_map: true
rolling_window: false
height: 50
width: 50
transform_tolerance: 0.5
plugins:
- {name: static_layer, type: "costmap_2d::StaticLayer"}
- {name: obstacle_layer, type: "costmap_2d::ObstacleLayer"}
- {name: inflation_layer, type: "costmap_2d::InflationLayer"}
movebase launch file
<node pkg="move_base" type="move_base" respawn="false" name="move_base" output="screen">
<remap from="cmd_vel" to="delta_robot/cmd_vel"/>
<rosparam file="nav/costmap_common_params.yaml" command="load" ns="global_costmap" />
<rosparam file="nav/costmap_common_params.yaml" command="load" ns="local_costmap" />
<rosparam file="nav/local_costmap_params.yaml" command="load" />
<rosparam file="nav/global_costmap_params.yaml" command="load" />
<param name="base_global_planner" value="global_planner/GlobalPlanner" />
<param name="planner_frequency" value="1.0" />
<param name="planner_patience" value="5.0" />
<rosparam file="nav/teb_local_planner_params.yaml ...
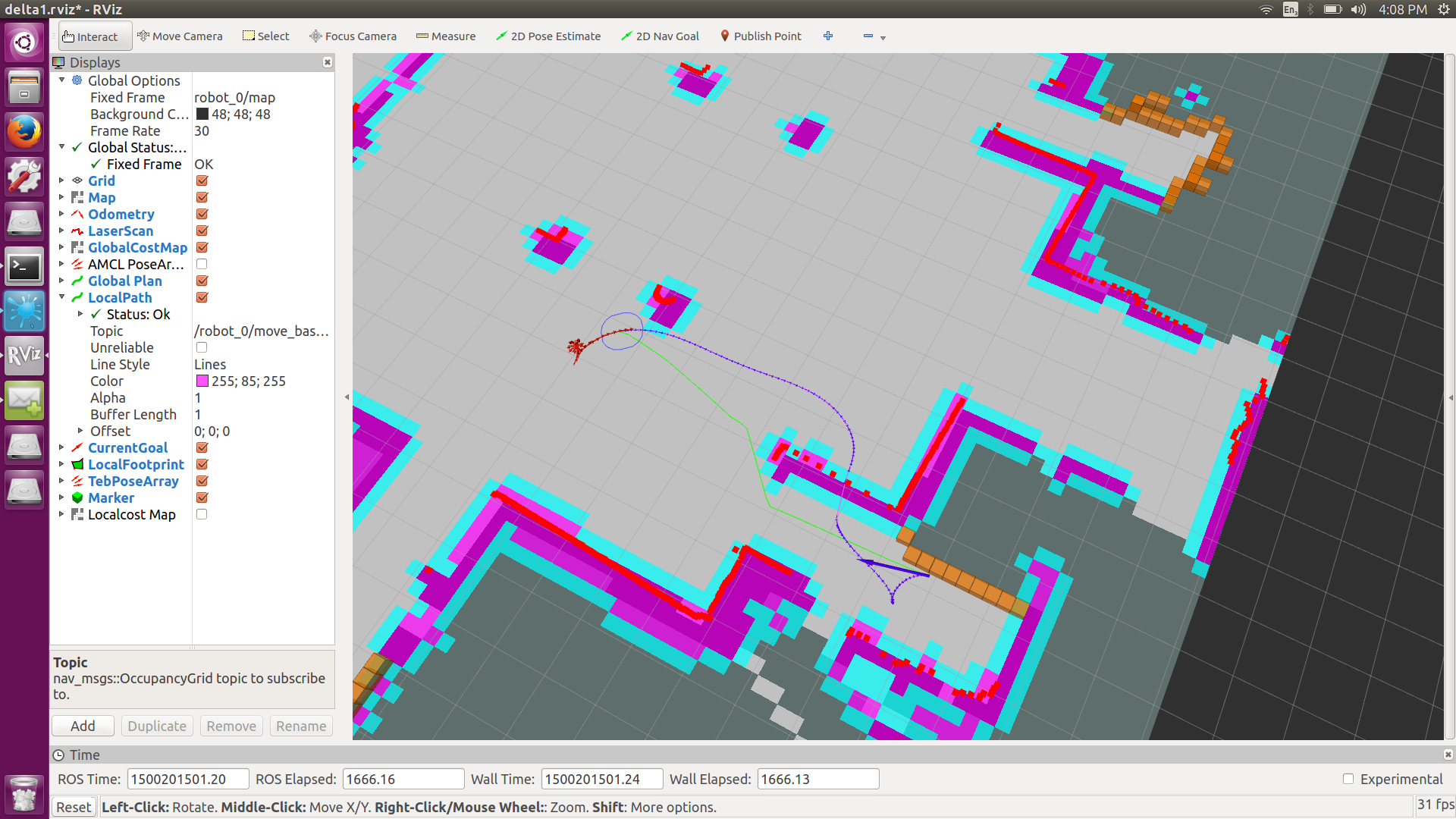
can you please post an image with only the global planner stuff? like costmaps and plan...