
Kinect with UR5 avoiding collisions
I would like to create a system that evaluates a real space using a Kinect and simulate an UR5 that deflects from obstacles using MoveIt !.
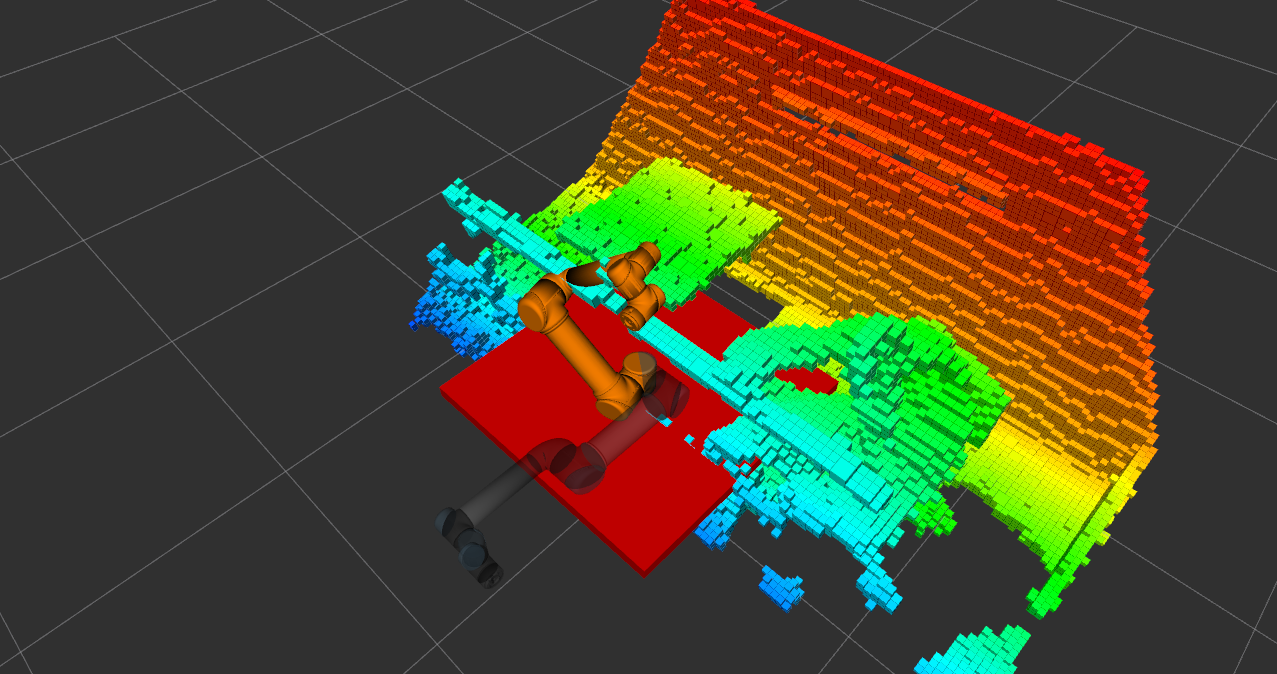
Currently I've done a simulation using Rviz and MoveIt! In this visualization I have the point cloud and the manipulator together, however the manipulator does not avoid collisions with obstacles.
In fact, if anyone needs more information to help me, I can send photos or videos.
Could someone tell me what steps I should take?
add a comment


{kind=link}