
Odom position below map, navigation problem
Hi all
I'm implementing the simulation for a robot which has to move within an environment composed by a ground floor (which will be not used) and a first floor.
The mapping task seems to be ok, the robot can map the first floor with good accuracy.
The navigation task has to be performed at the first floor and has problems: first thing, which I don't know if it's an error, the robot odom frame seems to be under the spawned map and robot.
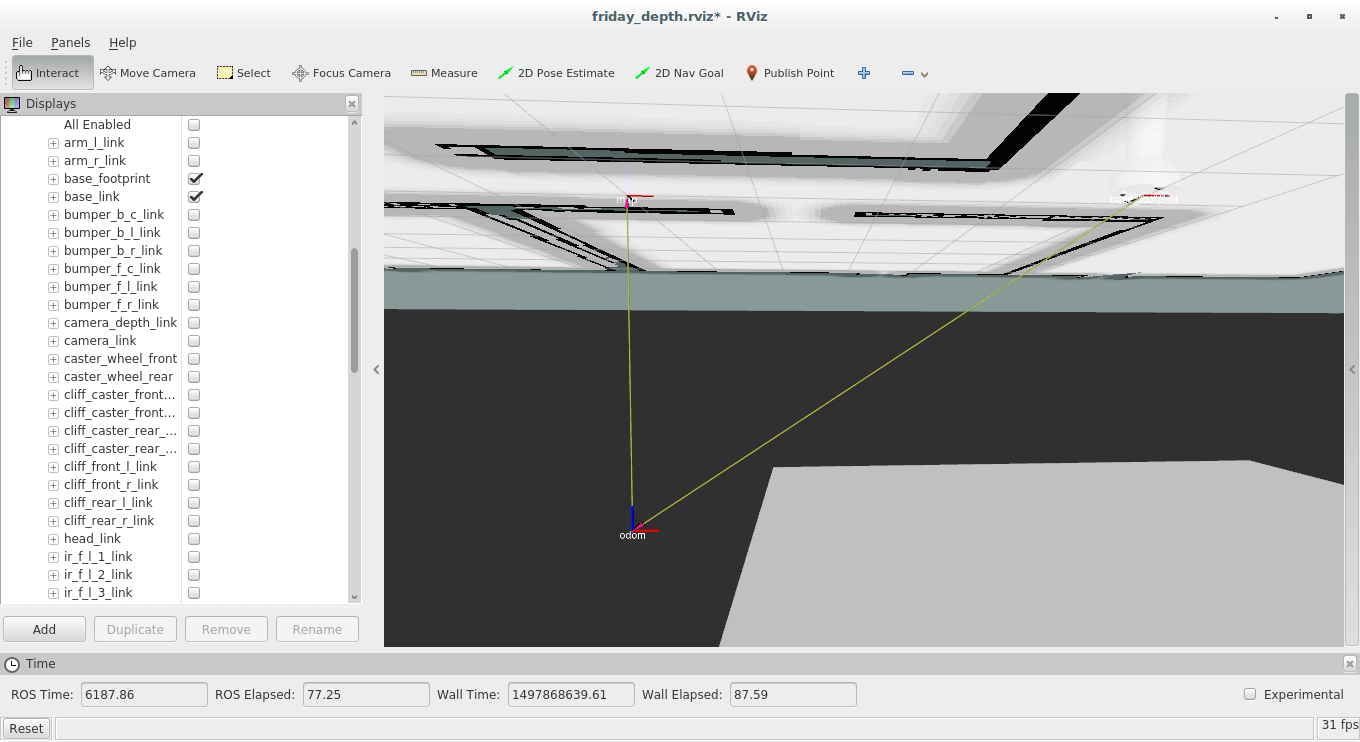
The main problem is that the local costmap seems to not mark the possible obstacles, the local costmap remains light gray as you can see in the picture about the frames if i set to "/odom" the global_frame in the local_costmap_param, so the path planner doesnt work as it should be, instead if i set to "/map" the global_frame in the local_costmap_param it seems to mark the obstacles and walls, but anyway a lot of times it fails to avoid them and to reach a goal because the path is really closed to the wall or obstacles.
These are my param files
base_local_planner.yaml
TrajectoryPlannerROS:
#Set the velocity limits of the robot
max_vel_x: 0.4
min_vel_x: -0.2 #0.1
max_vel_theta: 0.2
min_vel_theta: -0.2
min_in_place_vel_theta: 0.2
#The velocity the robot will command when trying to escape from a stuck situation
escape_vel: -0.2
#Set the acceleration limits of the robot
acc_lim_theta: 0.1
acc_lim_x: 0.1
acc_lim_y: 0.1
#Set the tolerance on achieving a goal
latch_xy_goal_tolerance: false
xy_goal_tolerance: 0.1
#Is it holonomic?
holonomic_robot: false
#How long and with what granularity it'll forward simulate trajectories
sim_time: 1.7
sim_granularity: 0.025
angular_sim_granularity: 0.025
vx_samples: 8
vtheta_samples: 20
#Parameters for scoring trajectories
path_distance_bias: 0.8 # 1.0 - weighting for how much it should stick to the global path plan
goal_distance_bias: 0.8 # 0.8 - wighting for how much it should attempt to reach its goal
gdist_scale: 0.8
pdist_scale: 1.0
occdist_scale: 0.5 # 0.01 - weighting for how much the controller should avoid obstacles
heading_lookahead: 0.325
dwa: false
meter_scoring: true
#How far the robot must travel before oscillation flags are reset
oscillation_reset_dist: 0.05
#Eat up the plan as the robot moves along it
prune_plan: false
#Global Frame id
global_frame_id: map`
costmap_common_param.yaml
footprint: [[0.39, 0.30], [0.39, -0.30], [-0.30, -0.30], [-0.30, 0.30]] #FRIDAY
footprint_padding: 0.0
transform_tolerance : 0.5
map_type: voxel
##OBSTACLE LAYER##
obstacle_layer:
enabled: true
obstacle_range: 2.5
raytrace_range: 3.0
#expected_update_rate: 0.0
#observation_persistence: 0.0
#min_obstacle_height: 0.0
max_obstacle_height: 1.0
publish_voxel_map: false
origin_z: 0.0
z_voxels: 2
z_resolution: 0.2
unknown_threshold: 15
mark_threshold: 0
combination_method: 1
track_unknown_space: true #true needed for disabling global path planning through unknown space
observation_sources: laser_scan_sensor #cliff_sensors
laser_scan_sensor:
data_type: LaserScan
topic: /friday/laser/scan
marking: true
clearing: true
#cloud_scan_sensor
#laser_scan_sensor
#sonar_scan_sensor
#sonar_scan_sensor: {sensor_frame: sonar_1, data_type: LaserScan, topic: /sonar_scan, marking: true, clearing: true, expected_update_rate: 100.0, min_obstacle_height: 0.1, max_obstacle_height: 0 ...
Hi, I'm encountering the same strange problem since friday. Have you found a solution? Could it depend on the value of odometrySource in the differential drive plugin?
Can you add a single tf value for your odom and map transforms? e.g. "rosrun tf tf_echo /base_footprint /odom" and "rosrun tf tf_echo /base_footprint /map"