
Sending multiple goals to Navigation Stack

I am writing a program for autonomous navigation of a Husky. I combining imu, wheel encoders and visual odometry for navigation. All the sensors have been successfully integrated and a target goal can be sent to the robot. Here is my question:
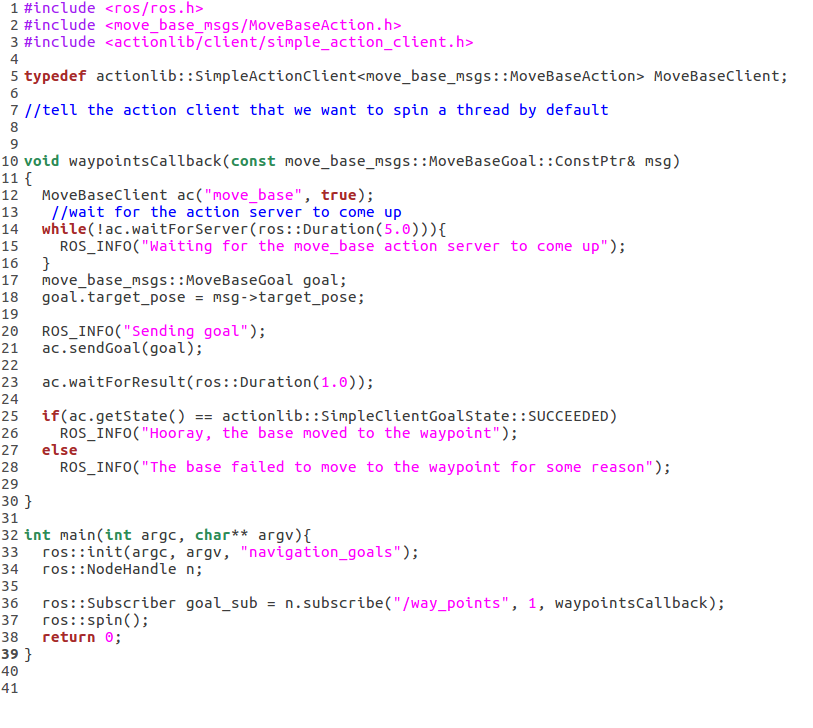
How can I send the robot multiple goals so that it will visit each goal and do not stop at each one? Right now, I am using the ac.waitForResult() function, (based on the "Sending Goals to the Navigation Stack" tutorial). The robot will stop at each goal and then move to the next one. I want the robot to move smoothly.
add a comment
