
How to tune robot_localization parameter [closed]

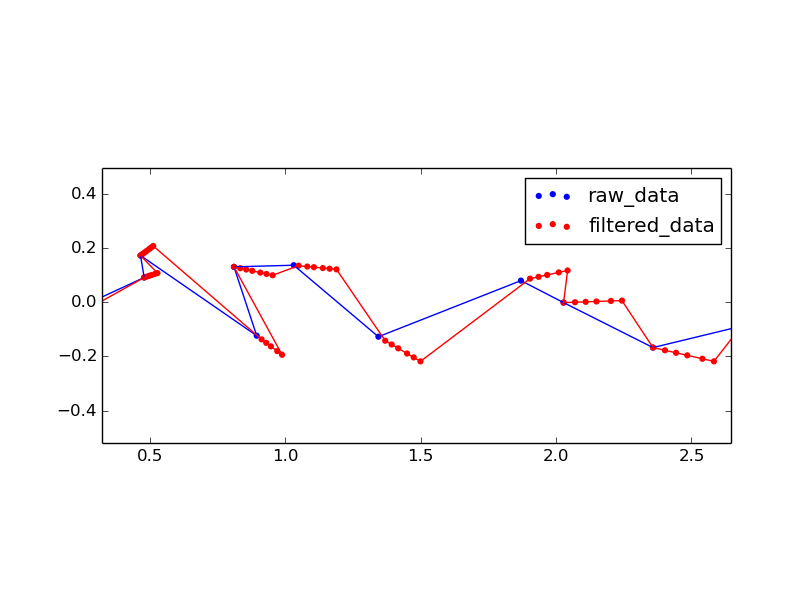
Hi Tom/all It's mentioned in the document of robot_localization that we can achieve superior results by tuning Q. If the odom data input has noise, which leads to oscillating trajectory as can be seen below. So is tuning Q the only way to eliminate that? What should I do with that ?
I do appreciate it if you can enlighten it to me.Thank you so much.

Also,during the interval of odom data,the red point( filtered data point ) just points straightly ,which seems that the imu data doesn't do any correction. Why is that?
The filtered data appears to be dragged back to odom data value when it receives odom data. It's so strange that can anyone offer some tips?
I publish the measurementCovariance which is rather small with the value of 1e-6. And measurementCovariance(0,0) is equal to 0. Should I adjust it?
It's not clear what your graph is showing. Is that X/Y position in your raw and filtered odometry data? Please provide your configuration and sample input messages.