
How does costmap determine its orientation?
Hi,
I have tried to publish a frame specifically to make a costmap be oriented in the way that I want, but it seems that the costmap is always oriented to the "map" tf, even when I specify a different global frame in the costmap's yaml file.
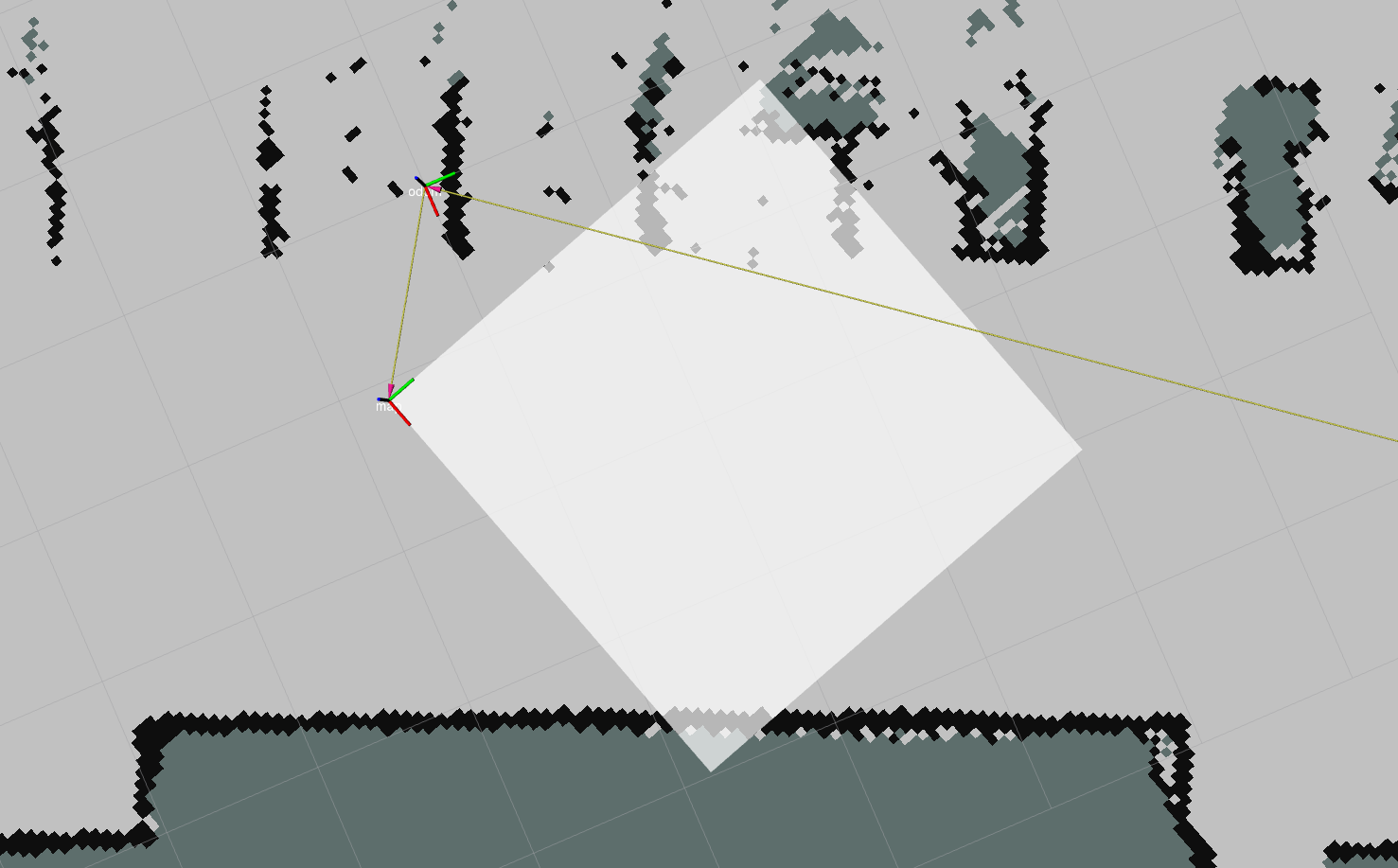
In the image below, you can see that the costmap is aligned with map:
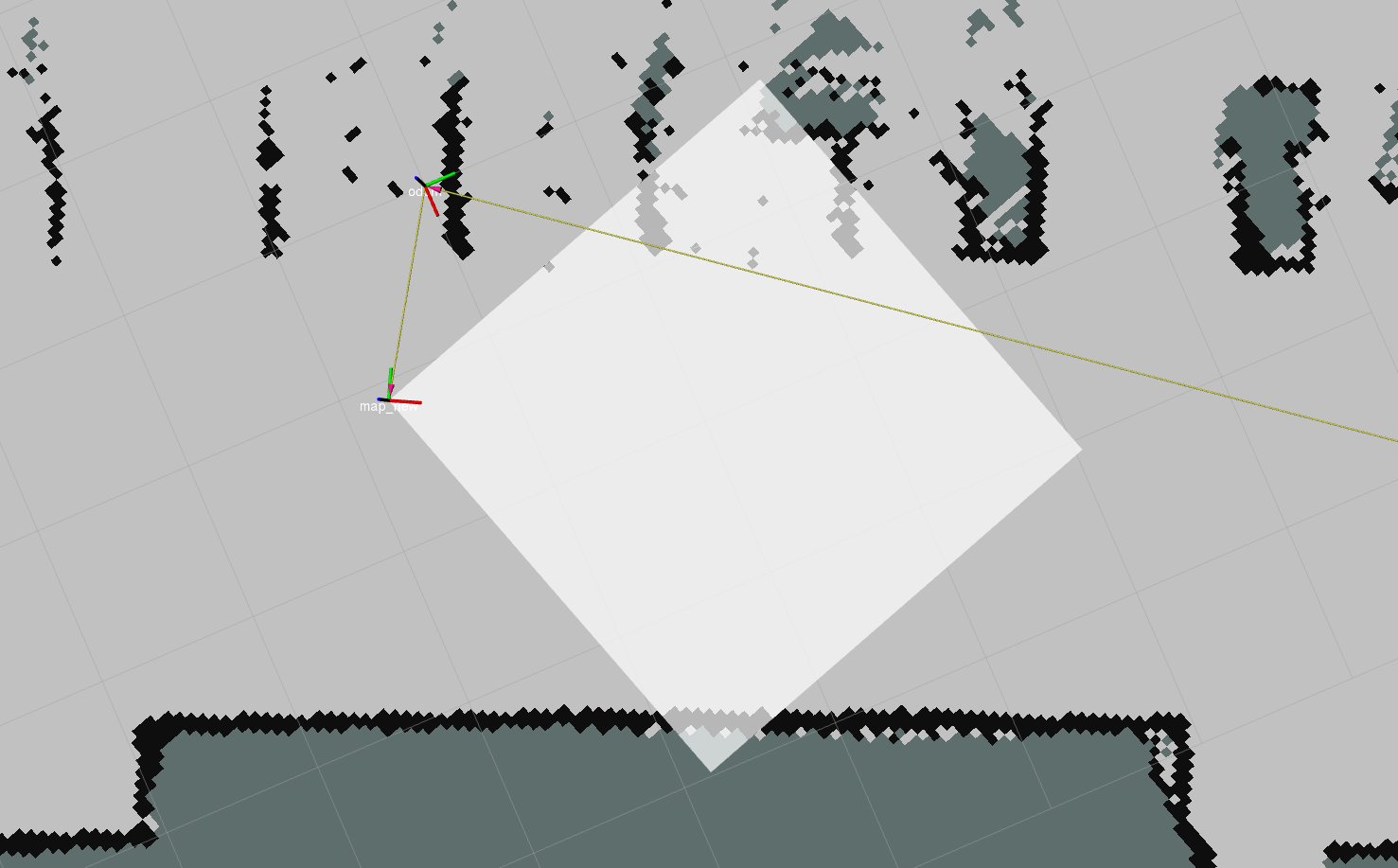
However, in the yaml file, I do not have "map" as the global frame. I specify "map_new" as the global frame. This frame is one that I publish specifically for the costmap to have a different orientation. In this image, you can see that "map_new" is significantly different than "map", and that the costmap is not aligned with "map_new" at all:
Here is the yaml file for the costmap:
costmap:
plugins:
- {name: obstacle_layer, type: "costmap_2d::ObstacleLayer"}
- {name: inflation_layer, type: "costmap_2d::InflationLayer"}
global_frame: /map_new
robot_base_frame: /base_link
static_map: true
rolling_window: false
resolution: 0.01
update_frequency: 20
publish_frequency: 20
width: 3
height: 3
origin_x: 0
origin_y: 0
obstacle_range: 10.0
raytrace_range: 10.0
transform_tolerance: 2.0
robot_radius: 0.225
always_send_full_costmap: true
inflation_layer:
enabled: true
inflation_radius: 0.1
obstacle_layer:
enabled: true
origin_z: 0.0
z_voxels: 2
max_obstacle_height: 1.4
observation_sources: scan bump
scan:
data_type: LaserScan
topic: scan_filtered
marking: true
clearing: true
min_obstacle_height: 0.0
max_obstacle_height: 0.35
bump:
data_type: PointCloud2
topic: mobile_base/sensors/bumper_pointcloud
marking: true
clearing: true
min_obstacle_height: 0.0
max_obstacle_height: 0.15
The "map_new" frame uses "map" as its parent, but since I specify "map_new" as the global frame, I would expect the costmap to be aligned with "map_new". How does the costmap determine which frame it will align its axes with?

