
How to use your custom map for turtlebot navigation in simulation?
Hello all,
I have built a custom map of my building and I want to use it in simulation (Rviz) to test my code. In simple words, I want some like turtlebot_stage turtlebot_in_stage.launch with my map and without a stage.
I am trying to do it, but I am getting a lot of error. This is another question I have posted regarding the error I am facing when I launched my custom launch file.
This is my launch file
<launch>
<arg name="base" value="$(optenv TURTLEBOT_BASE kobuki)"/> <!-- create, rhoomba -->
<arg name="stacks" value="$(optenv TURTLEBOT_STACKS hexagons)"/> <!-- circles, hexagons -->
<arg name="3d_sensor" value="$(optenv TURTLEBOT_3D_SENSOR kinect)"/> <!-- kinect, asus_xtion_pro -->
<include file="$(find turtlebot_bringup)/launch/includes/robot.launch.xml">
<arg name="base" value="$(arg base)" />
<arg name="stacks" value="$(arg stacks)" />
<arg name="3d_sensor" value="$(arg 3d_sensor)" />
</include>
<node name="joint_state_publisher" pkg="joint_state_publisher" type="joint_state_publisher">
<param name="use_gui" value="true"/>
</node>
<node pkg="tf" type="static_transform_publisher" name="base_footprint_to_map" args="0 0 0 0 0 0 /map /base_footprint 100"/>
<node name="rviz1" pkg="rviz" type="rviz" args="-d $(find turtlebot_rviz_launchers)/rviz/navigation.rviz"/>
</launch>
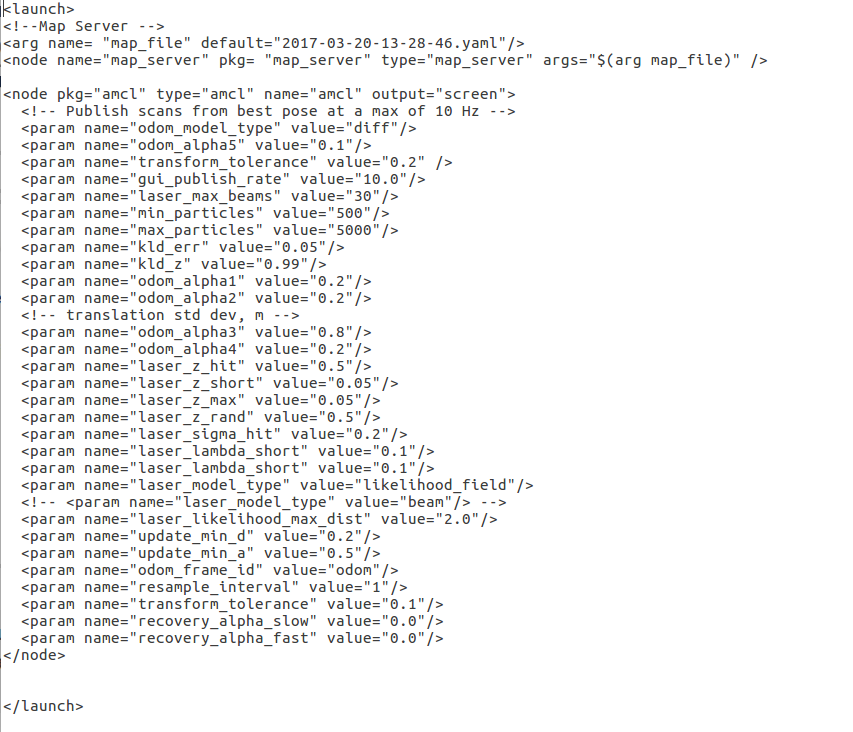
also I am running a map with map_server node and amcl using rosrun amcl amcl
In the terminal where I ran amcl node i get an error saying that no messages revieced on /scan topic. So, I am not sure how to publish a simulated /scan messages.
Does anyone used a custom map in simulation ( I am sure a lot of people did it). If yes, can you please help me?
Thanks, Sai Krishna Allani


{kind=link}