
How to change orientation of interactive marker of cartesian path planner?

I have a 6DOF arm and I have configured move_it for the arm in indigo. I am using the cartesian path planner plugin to define waypoints for the arm. But the interactive marker from the plugin is not aligning with the end effector axis.
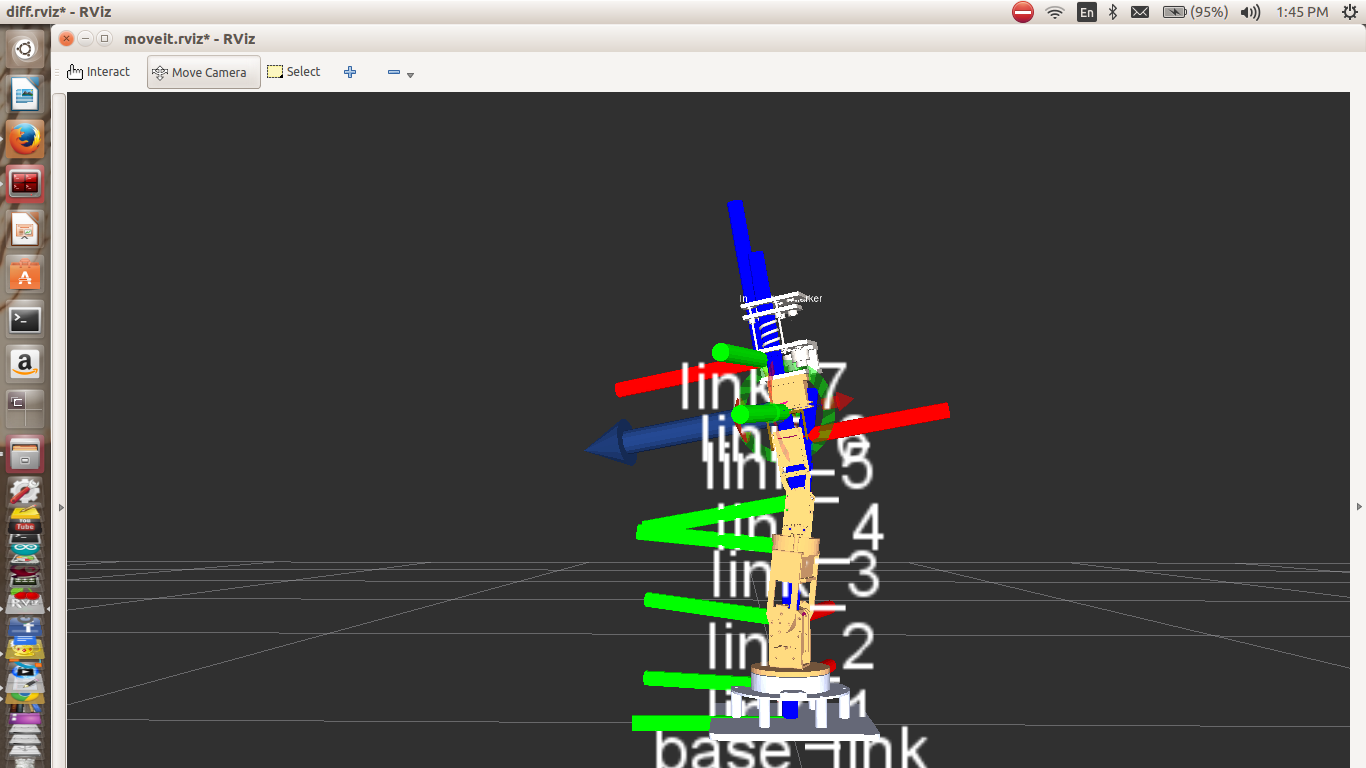
In this picture, you can see that the endeffector is facing upwards but the marker is not aligned with the axis of end effector. How to make the interactive marker point the correct axis?
add a comment

{kind=link}