Answering to your last comment:
1/ I wanted to know if their return type can be changed and if so, how.
=> I don't think so.
2/ I want to run a single callback function to handle the messages based on the topic they listen to.
=> well nothing stops you to call the same callback on differents topics, if their message types are the same.
If the message types differ,you can probably template your argument "msg_type::ConstPtr& msg" and then test inside your callback which message type you have received and execute different things depending on this type. I don't see why you would do so instead of creating multiple callbacks but it seems possible to me. ( I believe that the multiple callbaks would be created anyway, it's just that you wouldn't see it since your compiler would create thoses multiple callbacks for you )
3/ I have built the system with multiple callbacks, wanted to know if there is an alternative.
=> this looks like the exact same question as 2/
The real question is why do you want to have a single callback ?
The way you ask your questions, it seems it is because you need to aggregate information from multiple topics and you don't know how to do it ?
If that's really what you need to do, one way to do so is to use class method.
void Foo::callback(const std_msgs::StringConstPtr& message)
{
}
...
Foo foo_object;
ros::Subscriber sub = nh.subscribe("my_topic", 1, &Foo::callback, &foo_object);
//information available in foo_object
Edit with your added image :
What you want is a callback(msg1, msg2, msg3 ....) ?? I don't think that's possible. If you really want to have a single callback in your fb1 node, then you could create a new node "agregator" which create a new unique message from all other messages and then create only one callback in your main since you would have only one topic to receive
The question why you want a unique callback still remain.... If it's in order to share information, the answer is above, if it's to have a simpler/clearer code, just create all your nodehandler/subscriber inside a function "all_callbacks"..... if it's to synchronize your messages you can use a message filter http://wiki.ros.org/message_filters to synchronize the topics

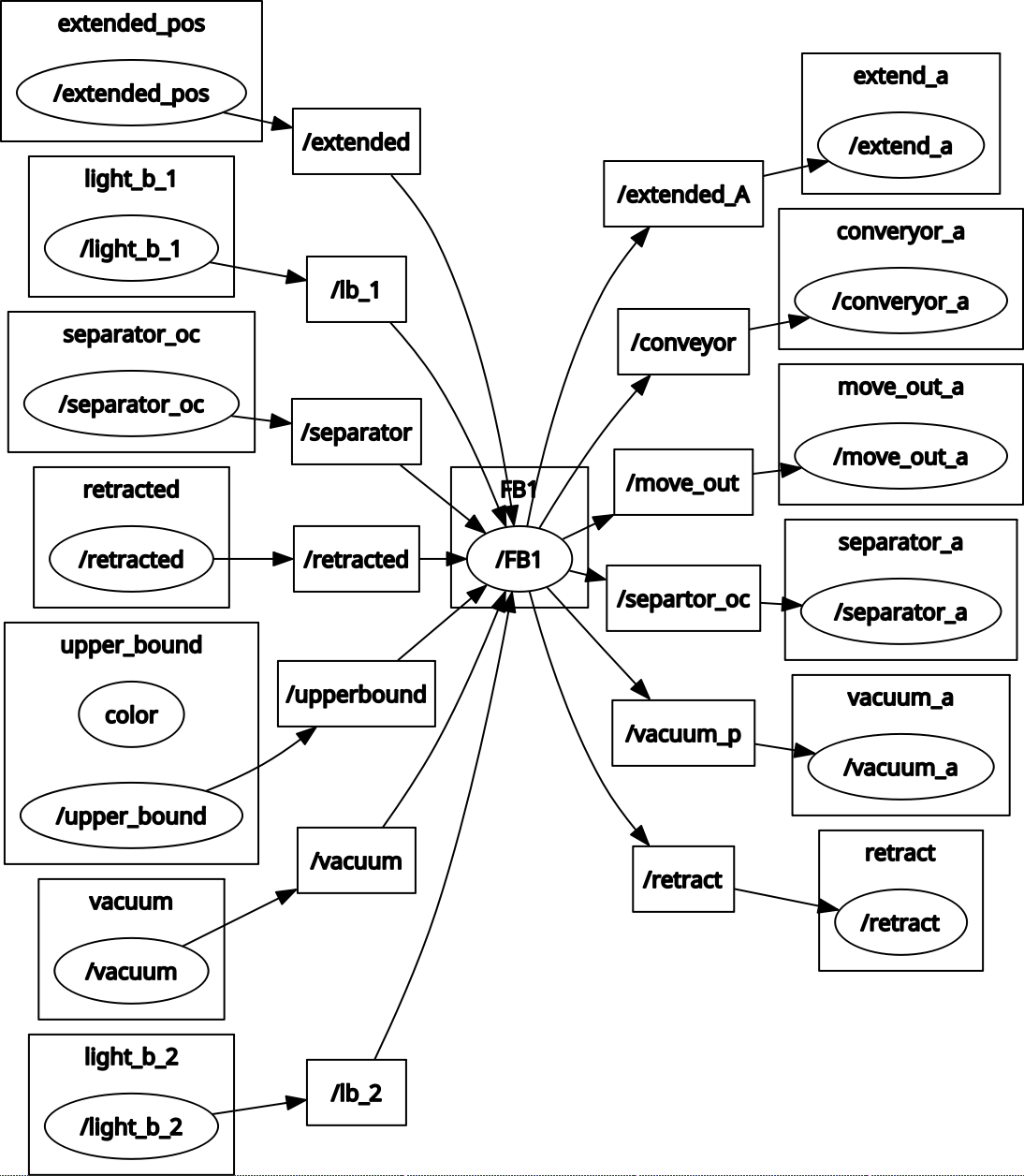 I have a separate callback for each of those topics, even though they carry the same message (left side carries one type and right the other). Is there a way to use a single callback function to handle both types of messages and handle all the requests at the same time?
I have a separate callback for each of those topics, even though they carry the same message (left side carries one type and right the other). Is there a way to use a single callback function to handle both types of messages and handle all the requests at the same time?
Can you clarify why you think that would require the function to have a return type?
I want it to return a type so that I can call it through a header file and run multiple instances of the same header file. Reducing the size of my code as I currently have a callback for each subscriber.
I don't see why simply using the callback by class wouldn't solve your issue : http://wiki.ros.org/roscpp/Overview/P... part 2.3.2 ?
I fail to see how returning a type and registering a callback multiple times have anything to do with each other.
Callbacks are just functions or methods. There is nothing special about them other than that they have a
voidreturn type and accept a single arg (the msg).@gvdhoorn I wanted to know if their return type can be changed and if so, how. I want to run a single callback function to handle the messages based on the topic they listen to. I have built the system with multiple callbacks, wanted to know if there is an alternative.