
Laser_Ortho_Projector Transformation

Hi,
I am having tf issues with scan tool as in in this link -> http://wiki.ros.org/laser_ortho_proje...
Under the package summary, it states that the tf transformation of world → base_ortho is already a provided transformation. Does this mean I still need to manually create a static transform between the world frame and base_ortho frame in my launch file? Because if I don't, rviz warns me that the base_ortho frame does not exist. So I am pretty confused what I actually need to do because at the moment the projected point cloud does not match the laser scans from my rplidar sensor.
I am hoping I will be able to obtain something like this -> https://www.youtube.com/watch?v=jHsdw...
Currently when I do a top down view on RVIZ, the raw laser scans do not coincide with the point cloud representation.
Please help me out. My project is due really soon :(
Thanks in advance!
My launch file:
<launch>
<param name="/use_sim_time" value="false"/>
<node pkg="laser_ortho_projector" type="laser_ortho_projector_node" name="laser_ortho_projector"
output="screen">
<param name="use_imu" type="bool" value="false"/>
<param name="publish_tf" type="bool" value="true"/>
</node>
<node pkg="tf" type="static_transform_publisher" name="world_to_map"
args="0 0 0 0 0 0 /world /map 100" />
<node pkg="tf" type="static_transform_publisher" name="map_to_base"
args="0 0 0 0 0 0 /map /base_link 100" />
<node pkg="tf" type="static_transform_publisher" name="base_to_laser"
args="0 0 0.5 3.14159 -0.57189 0 /base_link /laser 100" />
</launch>

Looking at the page you linked, I see:
Have you changed that value to
true? Otherwise I would not expectlaser_ortho_projectorto publish the TF frame.Yes, I changed the value to true from the start. I edited the demo.launch file provided. I have included the launch file above. Do I need to create a base_ortho frame before the laser_ortho_projector is able to generate the tf transformation?
Please always include all relevant information in your posting. We cannot guess what you have and have not already done.
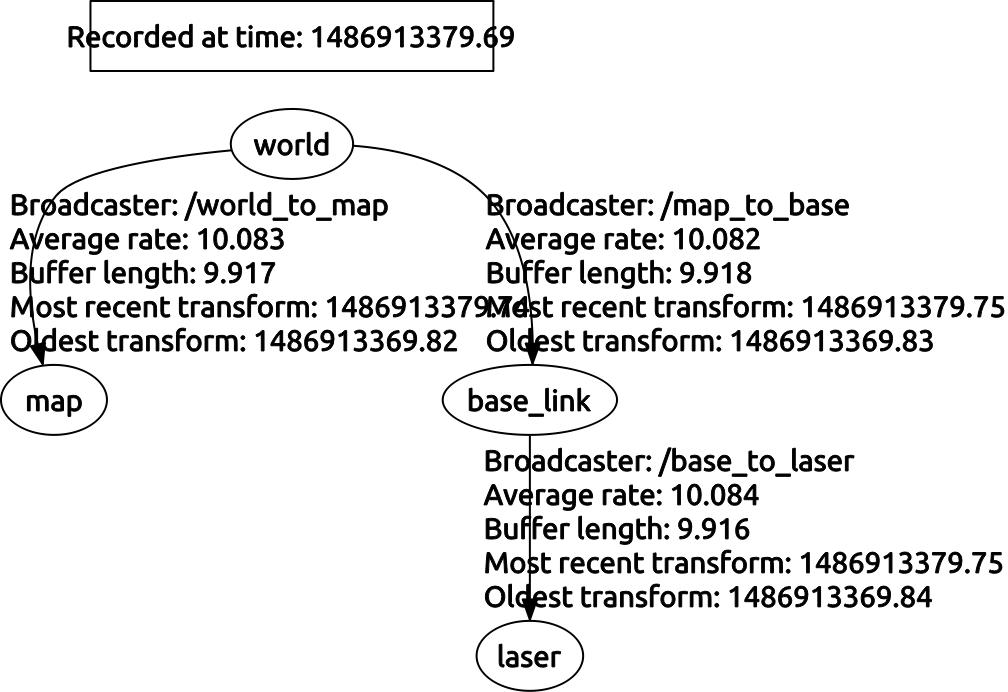
Please include a screenshot of
rqt_tf_treeafter you'veroslaunched your current launch file.Sorry, I was referring to your question regarding setting the
publish_tftotrue. I have included the screenshot of therqt_tf_treeabove.