
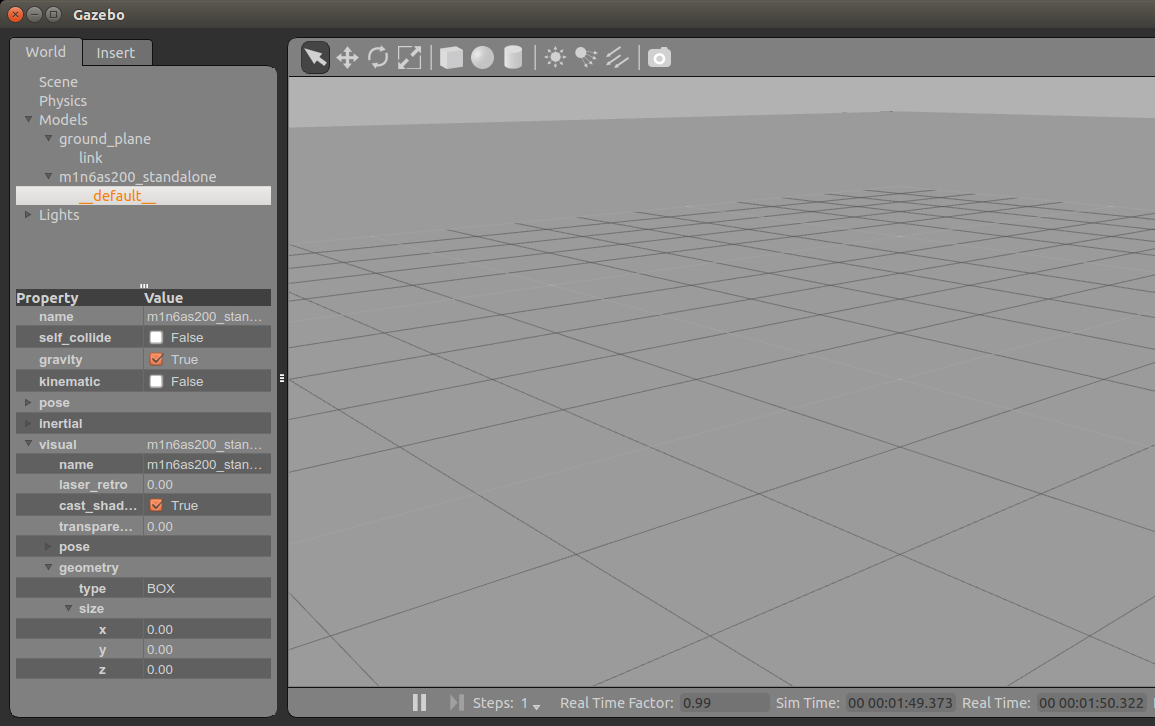
Empty model spawned in Gazebo [Kinova mico/jaco xacro]
I am trying to simulate a Kinova robot in gazebo. I wrote a basic launch file to bring up the robot (code below). The robot is not visible in the world. The robot name is visible in the models but the links are empty. I tried it for different .xacro files in kinova description with same result. This launch file works for pr2.urdf.xacro.
<launch>
<arg name="gui" default="true"/>
<arg name="paused" default="false"/>
<include file="$(find gazebo_ros)/launch/empty_world.launch">
<arg name="gui" value="$(arg gui)" />
<arg name="paused" value="$(arg paused)" />
</include>
<param name="robot_description" command="$(find xacro)/xacro.py '$(find kinova_description)/urdf/m1n6s200_standalone.xacro'" />
<arg name="robot_name" default="m1n6as200_standalone"/>
<node name="urdf_spawner" pkg="gazebo_ros" type="spawn_model"
args="-urdf -param robot_description -model $(arg robot_name) -z 0.12667"
respawn="false" output="screen"/>
</launch>
I used the same .xacro file for moveit setup assistant and it worked as expected. What is going wrong in here? How can I successfully spawn the model in gazebo?

I got a similar problem, but with Error [Param.cc:452] Unable to set value [-nan -nan -nan] for key[size], any solution so far?