
Noise when using Orbbec Astra
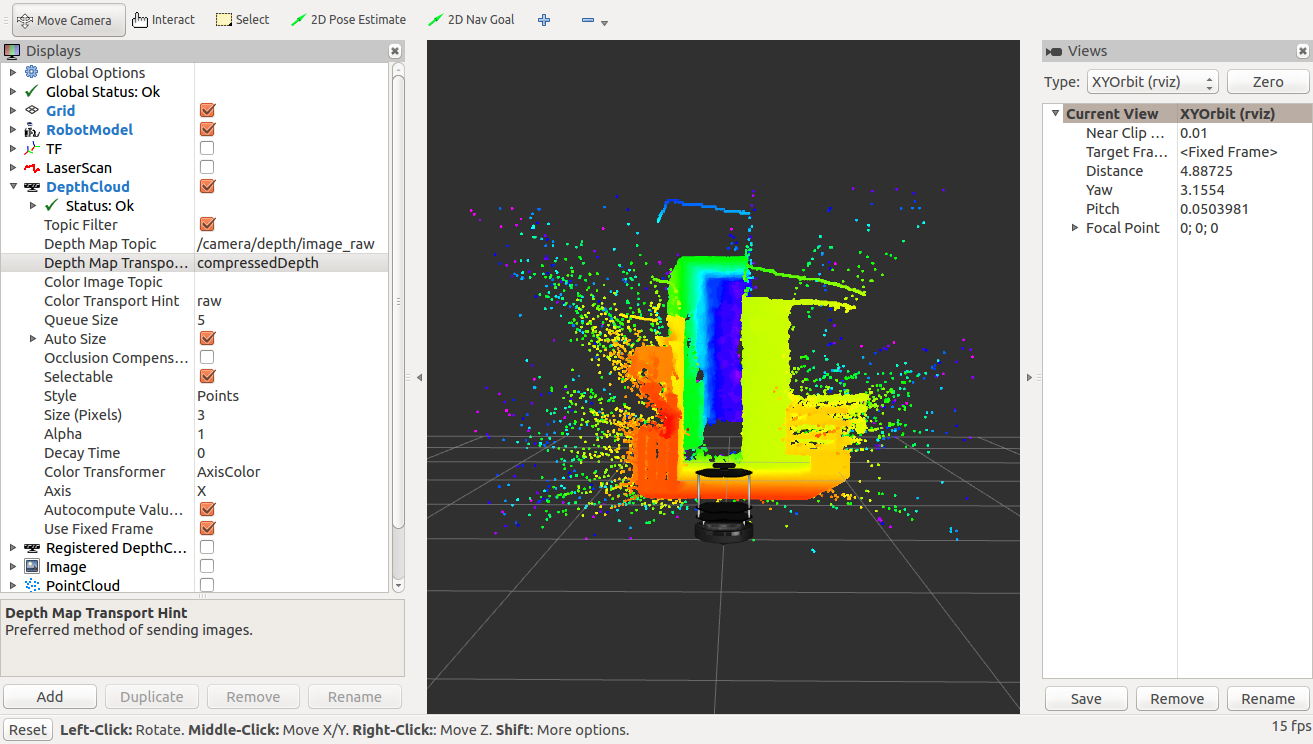
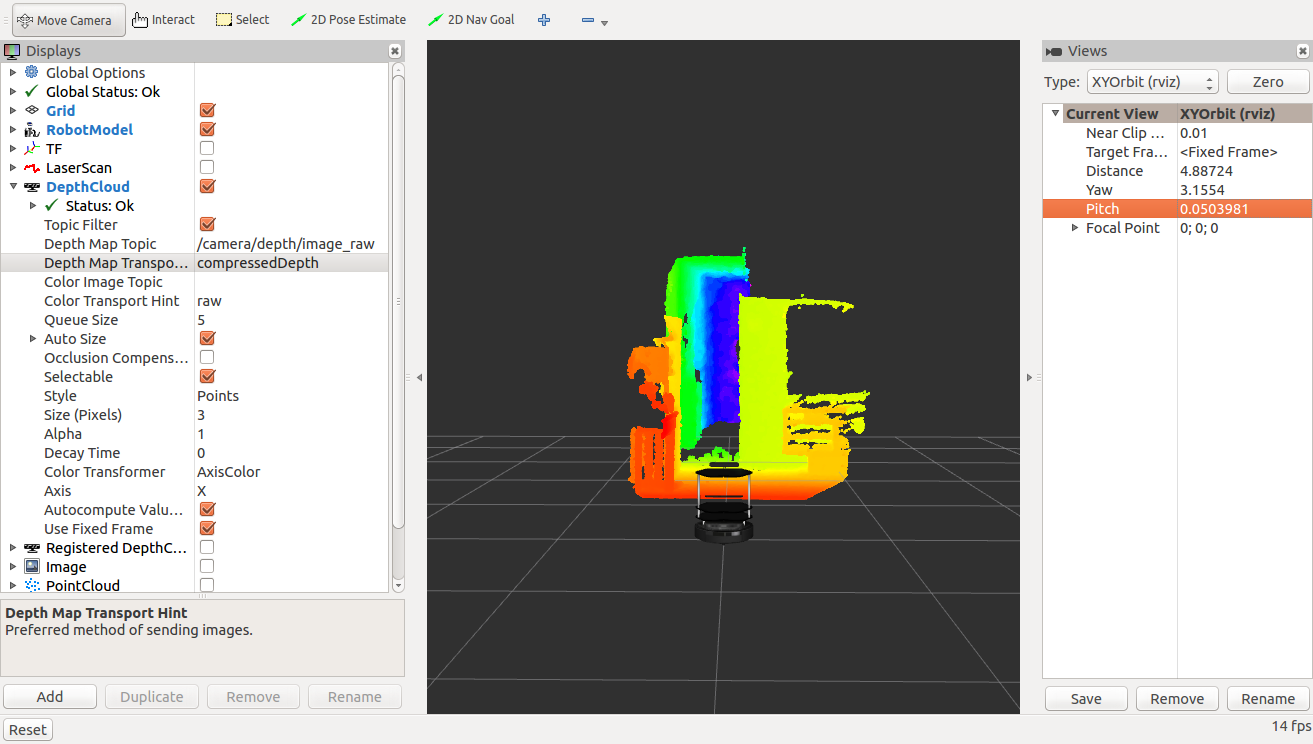
I'm using the Orbbec Astra on my DLR (Like Turtlebot2, running Nvida Jetson Tk1 as CPU). When I run it with TURTLEBOT_3D_SENSOR="asus_xtion_pro" the 3D Depth Cloud looks good. When I run it with TURTLEBOT_3D_SENSOR="astra" I get strange noise. Obviously I can continue to run it with asus_xtion_pro, but, it loads the wrong model etc.. Why is it giving so much noise? How can this be fixed?

I think you have to use the OpenNI2 module from Orbbec themselves. http://www.orbbec3d.net/Tools_SDK_Ope...
I've been trying to get this sensor working on a Pi (Failed thus far) but from what I've read there is a dev branch which has a filter in to solve this issue
Bit more info here:
https://3dclub.orbbec3d.com/t/astra-o...
I came across that. What I don't understand is. Why it okay when it thinks it's a Asus Xtion Pro? This robot came pre-installed with ROS and everything.. so it's possible they installed a new OpenNI2 module that fixed the issue, by using TURTLEBOT_3D_SENSOR="astra" it's pointed to the old one?