
Google Cartographer - Setup Issues
Hi All,
I'm trying to get google's cartographer up and running on my turtle-like robot. Using https://google-cartographer-ros-for-t... as a starting point.
I've updated demo_depth_camera_2d.launch & turtle_depth_camera_2d.lua
I have a problem with the tracking_frame parameter - it was set to gyro_link (which I don't have) so I tried setting it to imu_msg and base_link. Both with out success. I keep getting an error message:
W1105 11:30:18.000000 16684 tf_bridge.cc:51] "imu_msg" passed to lookupTransform argument source_frame does not exist
regardless if:
tracking_frame = "base_link"
or
tracking_frame = "imu_msg"
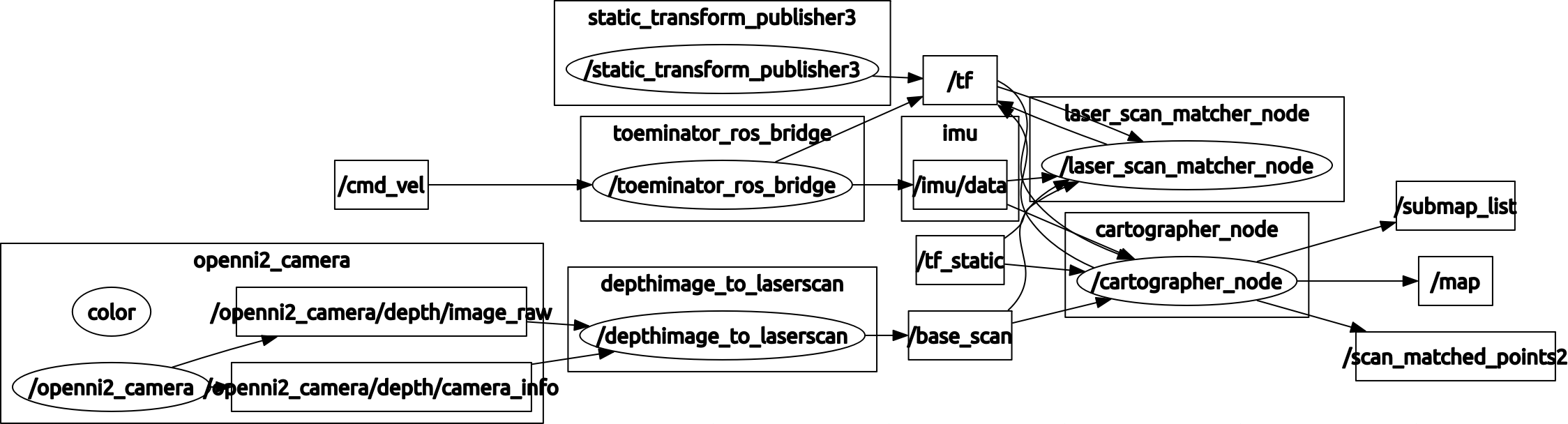
Does anyone have any thoughts? My graph is currently looking like:
Thanks
Mark
add a comment
