
robot_localization: EKF and navsat_transform problems [closed]
The objective: To navigate a Clearpath Husky robot in the outdoor environment with imu, odometry and GPS.
What I am doing now is to use a launch file that starts two EKF instances and one navsat_transform instance. The launch file is here: https://drive.google.com/file/d/0B_j5... I pretty much used a launch file that I found from another related post provided by Tom. The problems I have are:
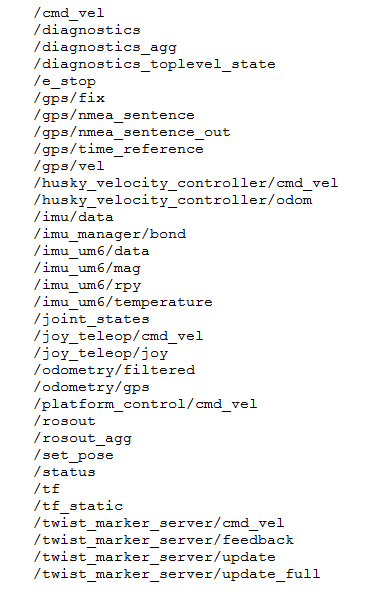
The launch file starts two EKF instances. However, at robot starts a EKF node at startup. So I got 3 EKF nodes in total. My question is how to get rid of the first EKF nodes? Here is a list of topics published at startup.
I also have problems with the navsat_transform node. It seems it is not receiving /imu/data based on the rqt_graph. The nodes publishes /gps/filtered data, but the /odometry/gps has all 0s in pose and twist.
I tried to set the yaw_offset to 1.507..., but the /odometry/filtered, /odometry/filtered/global still publish 0 degree when the robot was facing north.
After starting the launch file, it gave warnings that no transform from navsat -> base_link.
Another beginners' questions, where should i put the launch file? I just put the launch file any package (Husky_control for example) and launch the file with 'roslaunch Husky_control robot_localization.launch'. My understanding is it doesn't matter where the launch file is located, right?
Please help. I started to learn ROS a month ago, so I have a lot of confusion. Thanks,
