
Navigation for Pepper: Cannot transform from map to base_footprint
I'm trying to run AMCL for auto navigation with the robot Pepper.
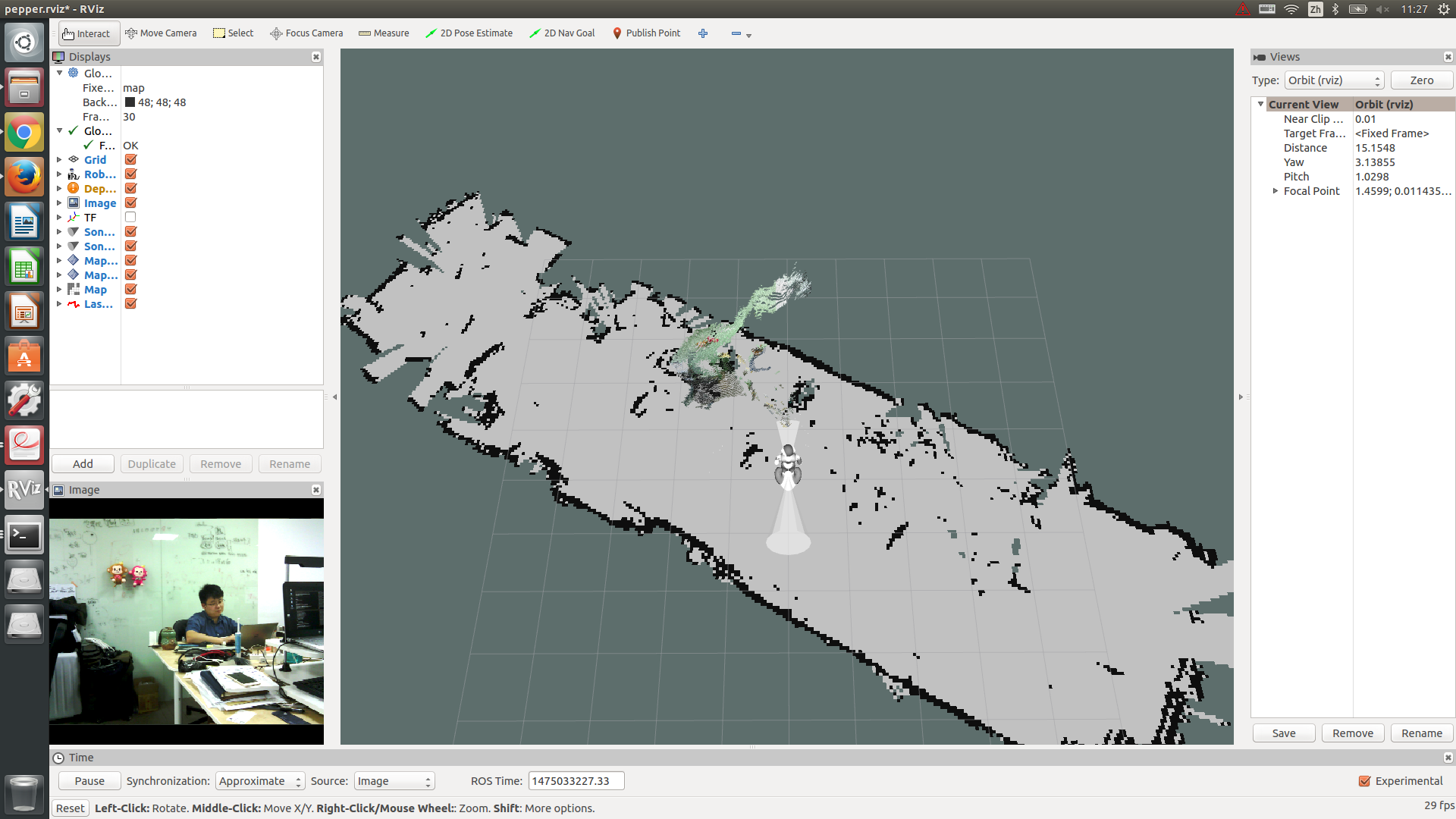
And I used the map that built by TurtleBot(gmapping). the result is shown as follow picture:
 and the frame tree file is here
It can load the map, and can set the initial position by 2D Postion estimate
but when I set the 2D Navigation Goal, the robot bring up node out comes the message:
and the frame tree file is here
It can load the map, and can set the initial position by 2D Postion estimate
but when I set the 2D Navigation Goal, the robot bring up node out comes the message:
Cannot transform from map to base_footprint
My navigation launch file are follow:
pepper_navagation.launch
<launch> <!-- Set the name of the map yaml file: can be overridden on the command line. --> <arg name="map" default="/home/axmros/tmp/office0614.yaml" /> <!-- Run the map server with the desired map --> <node name="map_server" pkg="map_server" type="map_server" args="$(arg map)"/> <include file="$(find pepper_navigation)/launch/includes/amcl.launch.xml"/> </launch>amcl.launch.xml
<launch> <arg name="use_map_topic" default="1"/> <arg name="scan_topic" default="/pepper_robot/laser"/> <arg name="odom_frame_id" default="odom"/> <arg name="base_frame_id" default="base_footprint"/> <arg name="global_frame_id" default="map"/> <node pkg="amcl" type="amcl" name="amcl"> <param name="use_map_topic" value="$(arg use_map_topic)"/> <!-- Publish scans from best pose at a max of 10 Hz --> <param name="gui_publish_rate" value="0.5"/> <param name="transform_tolerance" value="0.02"/> <param name="laser_max_beams" value="61"/> <param name="laser_max_range" value="5.0"/> <param name="min_particles" value="1000 * 4"/> <param name="max_particles" value="5000 * 4"/> <param name="odom_model_type" value="omni"/> <param name="resample_interval" value="8"/> <param name="odom_alpha1" value="1.1"/> <param name="odom_alpha2" value="1.1"/> <param name="odom_alpha3" value="10.0"/> <param name="odom_alpha4" value="0.1"/> <param name="odom_alpha5" value="0.1"/> <param name="laser_model_type" value="likelihood_field"/> <param name="laser_likelihood_max_dist" value="4.0"/> <param name="update_min_d" value="0.05"/> <param name="update_min_a" value="0.02"/> <param name="recovery_alpha_slow" value="0.0"/> <param name="recovery_alpha_fast" value="0.0"/> <param name="laser_z_rand" value="0.05"/> <param name="laser_z_hit" value="0.95"/> <param name="laser_sigma_hit" value="0.2"/> <param name="laser_z_short" value="0.01"/> <param name="laser_z_max" value="0.01"/> <param name="odom_frame_id" value="$(arg odom_frame_id)"/> <param name="base_frame_id" value="$(arg base_frame_id)"/> <param name="global_frame_id" value="$(arg global_frame_id)"/> <remap from="scan" to="$(arg scan_topic)"/> </node> </launch>
and the robot can't move, if I set the global frame id ad base_link or base_footprint, the robot can move but the odom can not match with the map. So what should I do to fix the problem?
Edit: At the beginning, I thought is the TF set problem, but when I run: tf_echo, everything is right.
axmros@axmros:~$ rosrun tf tf_echo /map /base_footprint
At time 1475199964.917
- Translation: [0.032, -0.007, -0.820]
- Rotation: in Quaternion [-0.004, -0.016, 0.000, 1.000]
in RPY (radian) [-0.008, -0.033, 0.000]
in RPY (degree) [-0.440, -1.867, 0.024]
At time 1475199964.917
- Translation: [0.032, -0.007, -0.820]
- Rotation: in Quaternion [-0.004, -0.016, 0.000, 1.000]
in RPY (radian) [-0.008, -0.033, 0.000]
in RPY (degree) [-0.440, -1.867, 0 ...
I've given you some karma. Please edit your question to include all the relevant bits directly, instead of linking to external file services.
thanks for you help, I have upload the rviz picture, but I can't upload the frame tree map, for it is a PDF document.
You could render it to PNG and attach that.
I have tried, but it is too huge to upload. If convert it to a small one, it is too small to display clearly.
That could be the case, I hadn't considered that.
Why did you replace the
pepper_navagation.launchandamcl.launch.xmlcontents with an image? My last edit showed it just fine?I want add the contents as code, but It is really hard to edit code in the edit box~~
Now I re-edited back. TKS
See if this version works for you. No images needed. Just make sure to indent code with at least 4 spaces. When you place code in a list, add another 4 spaces.
OK, I see, very very thanks for your help!