
amcl does not publish transforms to "future"
I am using rosbag to playback a bag file with messages from /tf, /scan, and /initialpose. I am trying to use amcl to localize the robot within that bag. I have set use_sim_time to be true.
The problem now is that the localization is not working properly: Even though tf messages indicate that the robot should be moving around, the localization from amcl is almost fixed around initial pose. I ran rqt_tf_tree (see below) and see that the timestamp of tf transforms from /map to /odom is less than the one from /odom to /base_footprint. I've tested several times, and it's always like this. According to amcl documentation, amcl publishes future dated transforms. So I believe if I fix the timestamp issue, amcl will work properly.
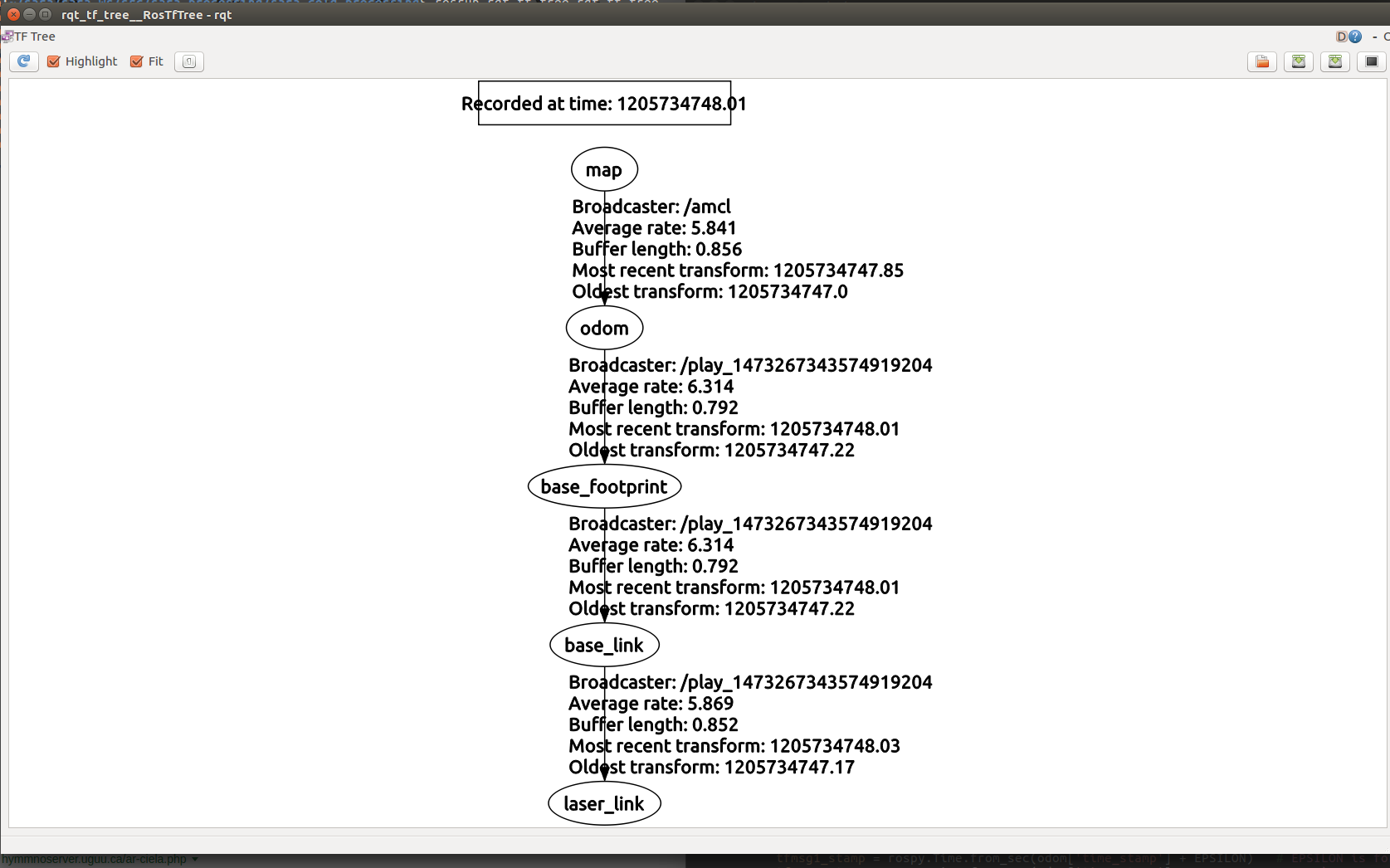
Does anyone have any idea why amcl is not publishing future dated transforms? How to force it to do so?
Additionally, here is an image with RVIZ showing the TF transforms. The problem is that, /odom is not fixed, but /base_footprint seems to be fixed.
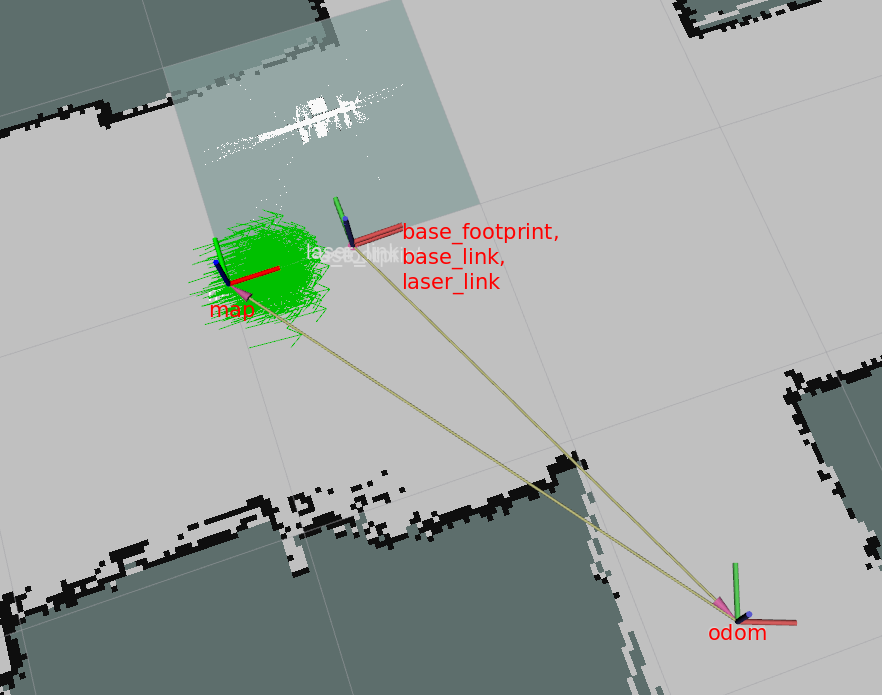
I appreciate your help.

What if you take
amclout of the picture (just for debugging purposes) ? Try playing back the bagfile and, in RViz, set the Fixed Frame toodom. Does thebase_linkmove now? Do theLaserScanmessages make sense?Yes. It moves. As expected,
odomframe drifts over time, so the path taken by the robot is not aligned with the map.LaserScanmessages make sense as well.Are you publishing clock?
rosbag play <file.bag> --clock?Well, I published to
/clockin the bag file. I didn't runrosbag playwith--clockargument. I just tried, but it didn't work either. Particles were just being recomputed again and again at the initial pose.