
Same tf tree changes some frames
Hello,
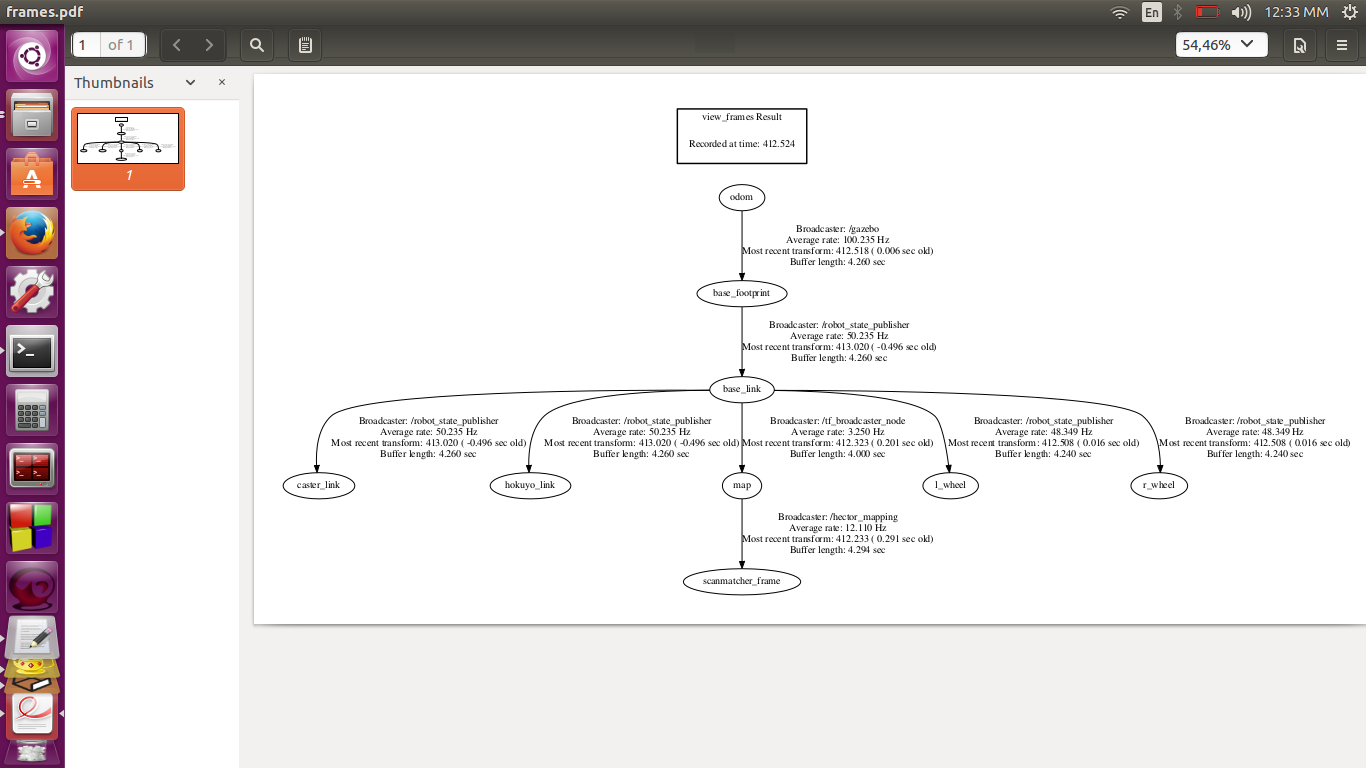
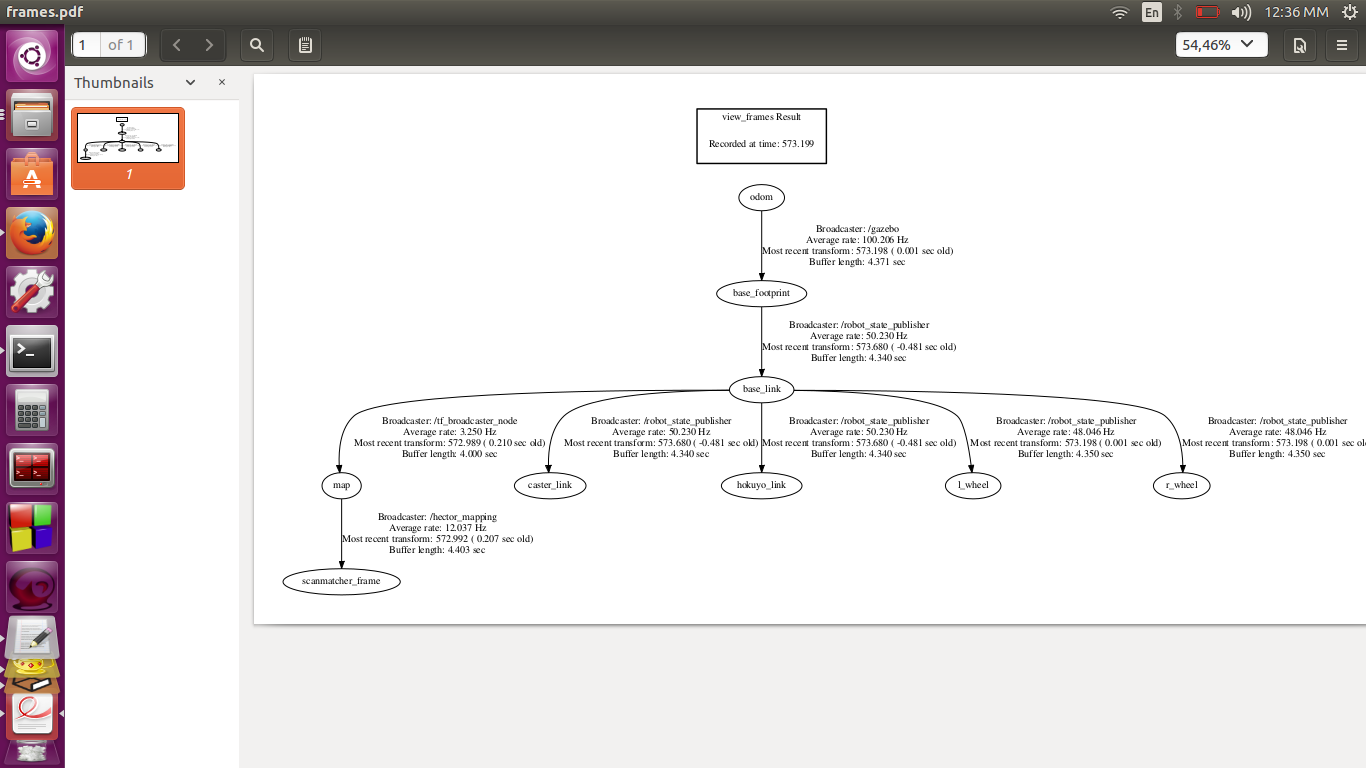
I am running hector_mapping and hector_exploration_node after roslaunching my robot in gazebo and today I noticed that the tf tree changes from time to time:

I also ran roswtf and I got the following issues, which I don't know if they are indirectly relevant to the tf trees above:
Loaded plugin tf.tfwtf
No package or stack in context
================================================================================
Static checks summary:
No errors or warnings
================================================================================
Beginning tests of your ROS graph. These may take awhile...
analyzing graph...
... done analyzing graph
running graph rules...
ERROR: connection refused to [http://legged-HP-ProBook-450-G2:44318/]
... done running graph rules
running tf checks, this will take a second...
... tf checks complete
Online checks summary:
Found 2 warning(s).
Warnings are things that may be just fine, but are sometimes at fault
WARNING The following node subscriptions are unconnected:
* /hector_mapping:
* /syscommand
* /gazebo:
* /gazebo/set_model_state
* /gazebo/set_link_state
* /labrob/cmd_vel
WARNING These nodes have died:
* labrob_spawn-3
Found 3 error(s).
ERROR Could not contact the following nodes:
* /rviz_1472030068686009566
ERROR The following nodes should be connected but aren't:
* /gazebo->/rviz_1472030068686009566 (/tf)
* /hector_exploration_node->/hector_exploration_node (/hector_exploration_node/global_costmap/footprint)
* /hector_mapping->/rviz_1472030068686009566 (/tf)
* /robot_state_publisher->/rviz_1472030068686009566 (/tf_static)
* /rviz_1472030068686009566->/hector_mapping (/initialpose)
* /tf_broadcaster_node->/rviz_1472030068686009566 (/tf)
* /robot_state_publisher->/rviz_1472030068686009566 (/tf)
* /gazebo->/rviz_1472030068686009566 (/clock)
ERROR Errors connecting to the following services:
* service [/rviz_1472030068686009566/get_loggers] appears to be malfunctioning: Unable to communicate with service [/rviz_1472030068686009566/get_loggers], address [rosrpc://legged-HP-ProBook-450-G2:59065]
* service [/rviz_1472030068686009566/set_logger_level] appears to be malfunctioning: Unable to communicate with service [/rviz_1472030068686009566/set_logger_level], address [rosrpc://legged-HP-ProBook-450-G2:59065]
I have the following launch file for my hector_mapping node:
<?xml version="1.0"?>
<launch>
<arg name="tf_map_scanmatch_transform_frame_name" default="scanmatcher_frame"/>
<arg name="base_frame" default="base_link"/>
<arg name="odom_frame" default="base_link"/>
<arg name="pub_map_odom_transform" default="false"/>
<arg name="scan_subscriber_queue_size" default="5"/>
<arg name="scan_topic" default="/labrob/laser/scan"/>
<arg name="map_size" default="2048"/>
<node pkg="hector_mapping" type="hector_mapping" name="hector_mapping" output="screen">
<!-- Frame names -->
<param name="map_frame" value="map" />
<param name="base_frame" value="$(arg base_frame)" />
<param name="odom_frame" value="$(arg odom_frame)" />
<!-- Tf use -->
<param name="use_tf_scan_transformation" value="false"/>
<param name="use_tf_pose_start_estimate" value="false"/>
<param name="pub_map_odom_transform" value="$(arg pub_map_odom_transform)"/>
<!-- Map size / start point -->
<param name="map_resolution" value="0.050"/>
<param name="map_size" value="$(arg map_size)"/>
<param name="map_start_x" value="0.5"/>
<param name="map_start_y" value="0.5" />
<param name="map_multi_res_levels" value="2" />
<!-- Map update parameters -->
<param name="update_factor_free" value="0.4"/>
<param name="update_factor_occupied" value="0.9" />
<param name="map_update_distance_thresh" value="0.01"/>
<param name="map_update_angle_thresh" value="0.001" />
<param name="laser_z_min_value" value = "-1.0" />
<param name="laser_z_max_value" value = "1.0" />
<!-- Advertising config -->
<param name="advertise_map_service" value="true"/>
<param name="scan_subscriber_queue_size" value="$(arg scan_subscriber_queue_size)"/>
<param name="scan_topic" value="$(arg scan_topic)"/>
<!-- Debug parameters -->
<!--
<param name="output_timing" value="false"/>
<param name="pub_drawings" value="true"/>
<param name="pub_debug_output" value="true"/>
-->
<param name="tf_map_scanmatch_transform_frame_name" value="$(arg tf_map_scanmatch_transform_frame_name)" />
</node>
<!--<node pkg="tf" type="static_transform_publisher" name="map_nav_broadcaster" args="0 0 0 0 0 0 map nav 100"/>-->
</launch>
I wanted to ask what is going on and if this is an error that could lead to wrong robot's behavior during autonomous exploration ?


Where is the difference between the trees? The ordering of the nodes after the base link is arbitrary so these trees are exactly the same (if I don't miss something important)
Thank you for your answer :)
I found this arbitrary positions of the frames weird, that's why I asked in case I have forgotten something.