
can't make a map with gmapping
hi guys, I am currently working on a Pioneer 3 with ROS. I would like to create a map with gmapping but I keep getting errors, maybe someone already did it and can help me ?
I tried with and without .bag file but the result is the same, when I tape "rosrun map_server map_saver" I get an "[ INFO] [1470077431.447071488]: Waiting for the map ".
here is what i do:
$ roscore
$ rosrun tf static_transform_publisher 0 0 0 0 0 0 base_link laser 100
$ rosrun rviz rviz
$ rosrun gmapping slam_gmapping scan:=scan _xmin:=0 _ymin:=0 _xmax:=10 _ymax:=10 _delta:=0.04
$ roslaunch joyCommand robot_joy.launch
$ sudo chmod a+rw /dev/ttyS0
$ rosrun rosaria RosAria _port:=/dev/ttyS0
$ sudo chmod a+rw /dev/ttyS2
$ sudo setserial /dev/ttyS2 irq 10
$ rosrun sicktoolbox_wrapper sicklms _port:=/dev/ttyS2 _baud:=38400 _resolution:=0.5 _connect_delay:=40
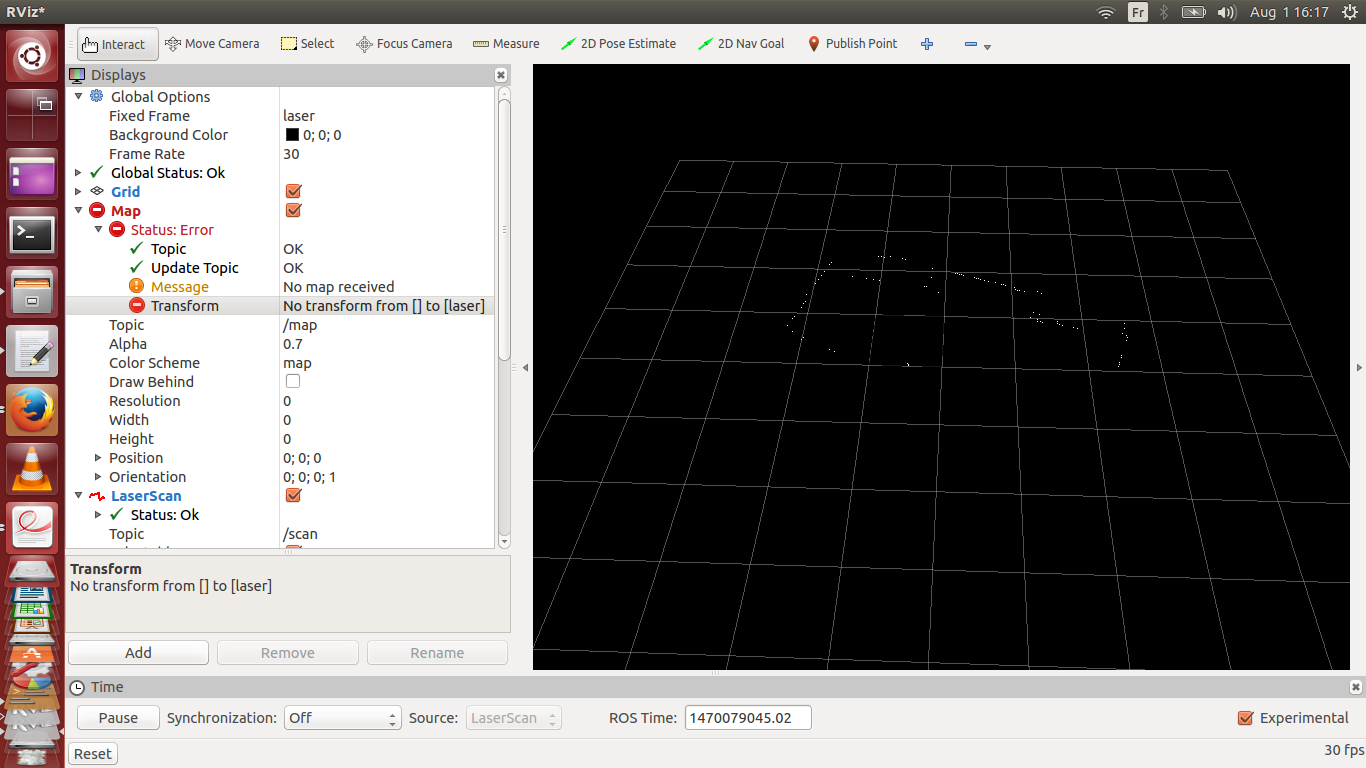
Then I walk the robot aound. I can see the laser on RVIZ but the status of the map is error and I get "No transform from [] to [laser]" which I don't understand.
In gmapping I get the warning : "[ WARN] [1470065513.054899811]: MessageFilter [target=odom ]: Dropped 100.00% of messages so far. Please turn the [ros.gmapping.message_notifier] rosconsole logger to DEBUG for more information.
If I launch the debug (rqt_logger_level) I get : [DEBUG] [1470154442.550934882]: MessageFilter [target=odom ]: Removed oldest message because buffer is full, count now 5 (frame_id=laser, stamp=1470154551.427095) Also "rostopic echo map" or rostopic echo map_metadata" never give anything.
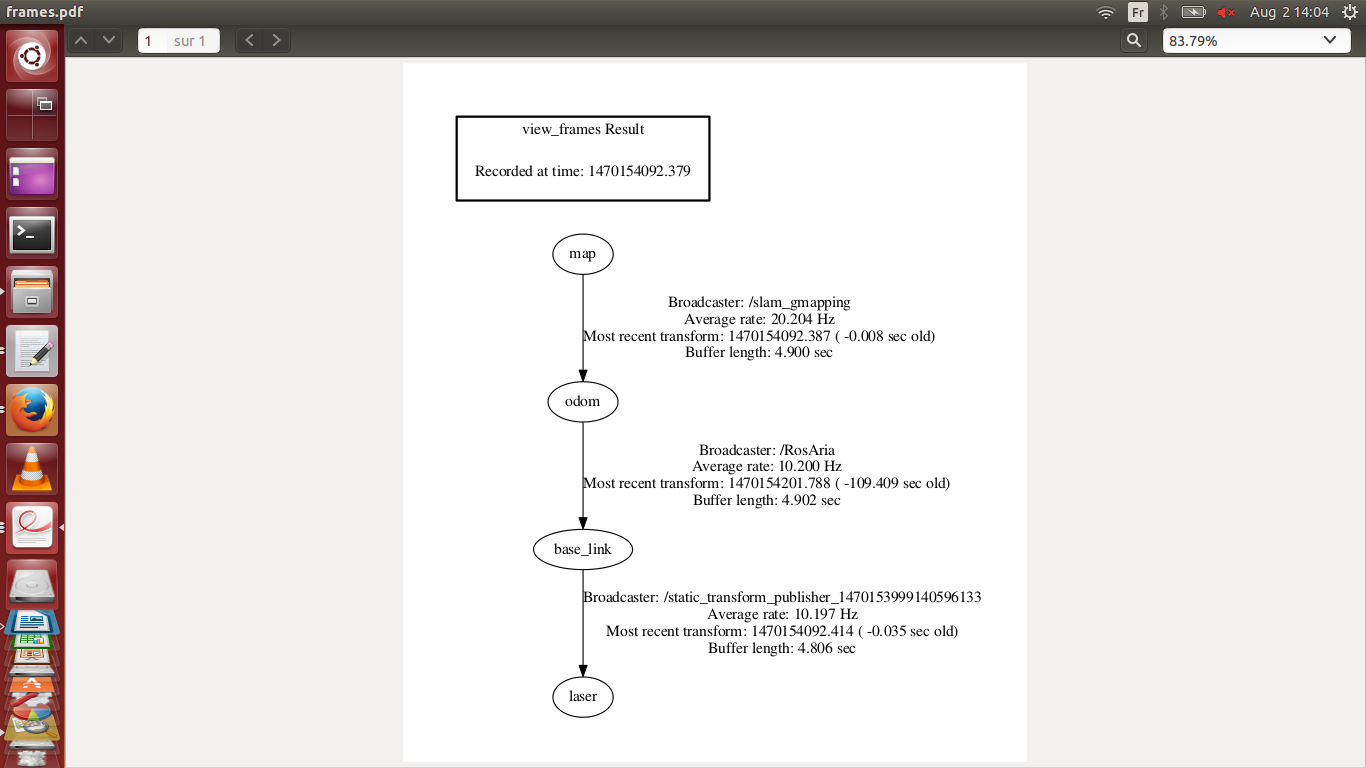
Finally my frames ( rosrun tf view_frames ) give me map -> odom -> base_link -> laser
here is some screenshot

If anyone can help me that would be great ! Thank you for your time,
Adèle

