
Unexplained grid_map cells using RTAB-map
I recently started using RTAB-map (Debian package) under ROS Indigo and Ubuntu 14.04. After doing a short mapping run, I bring up localization mode and view the results in RViz. For the Map display in RViz, I am subscribing to the /rtabmap/grid_map topic and there is an odd semi-circular arc of map cells displayed in the rear half of the plane behind the robot as shown below:
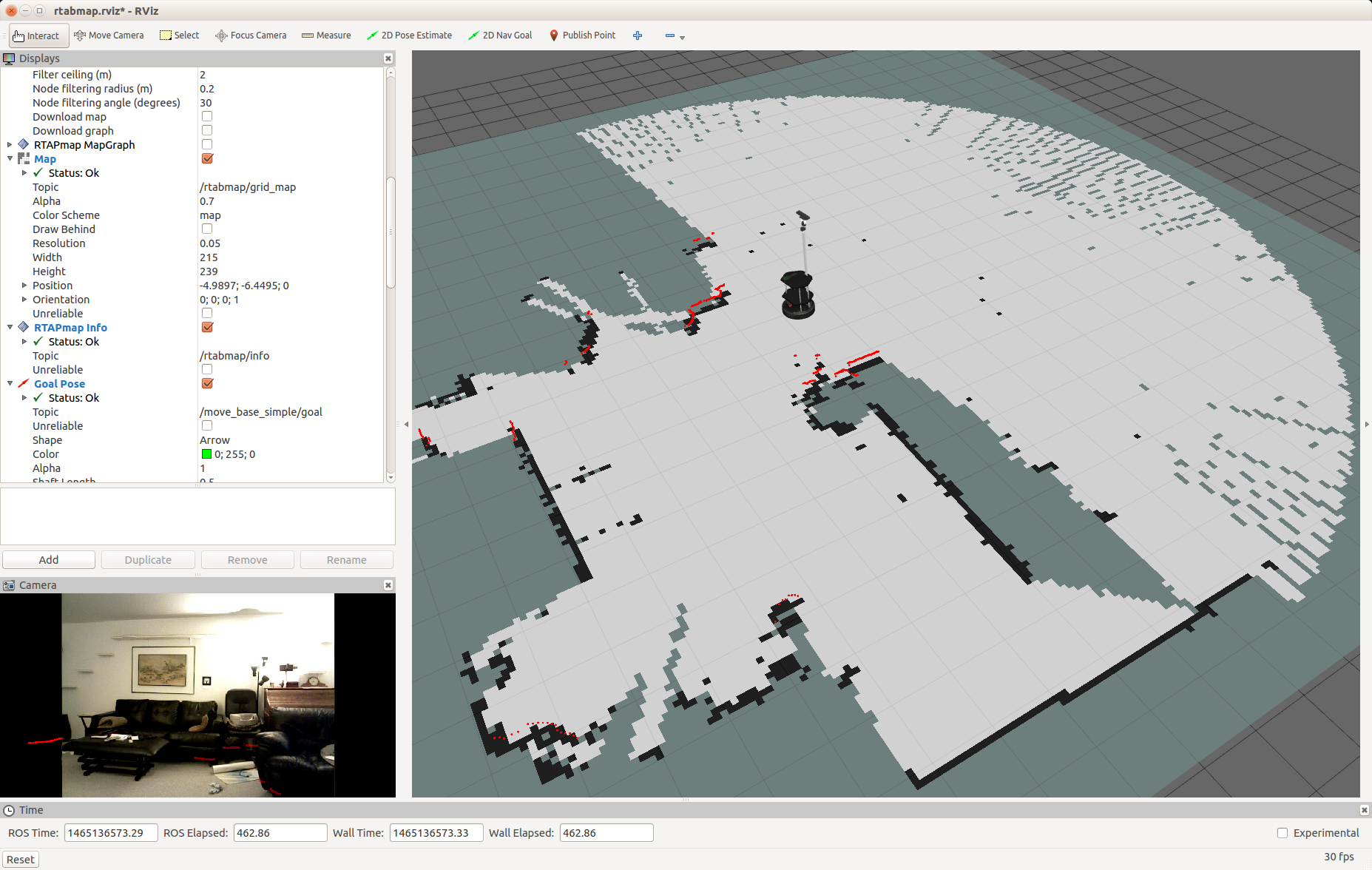
If I rotate the robot, the arc follows the motion. If I change the Map topic to /rtabmap/proj_map, the arc goes away and the map looks normal as shown below:
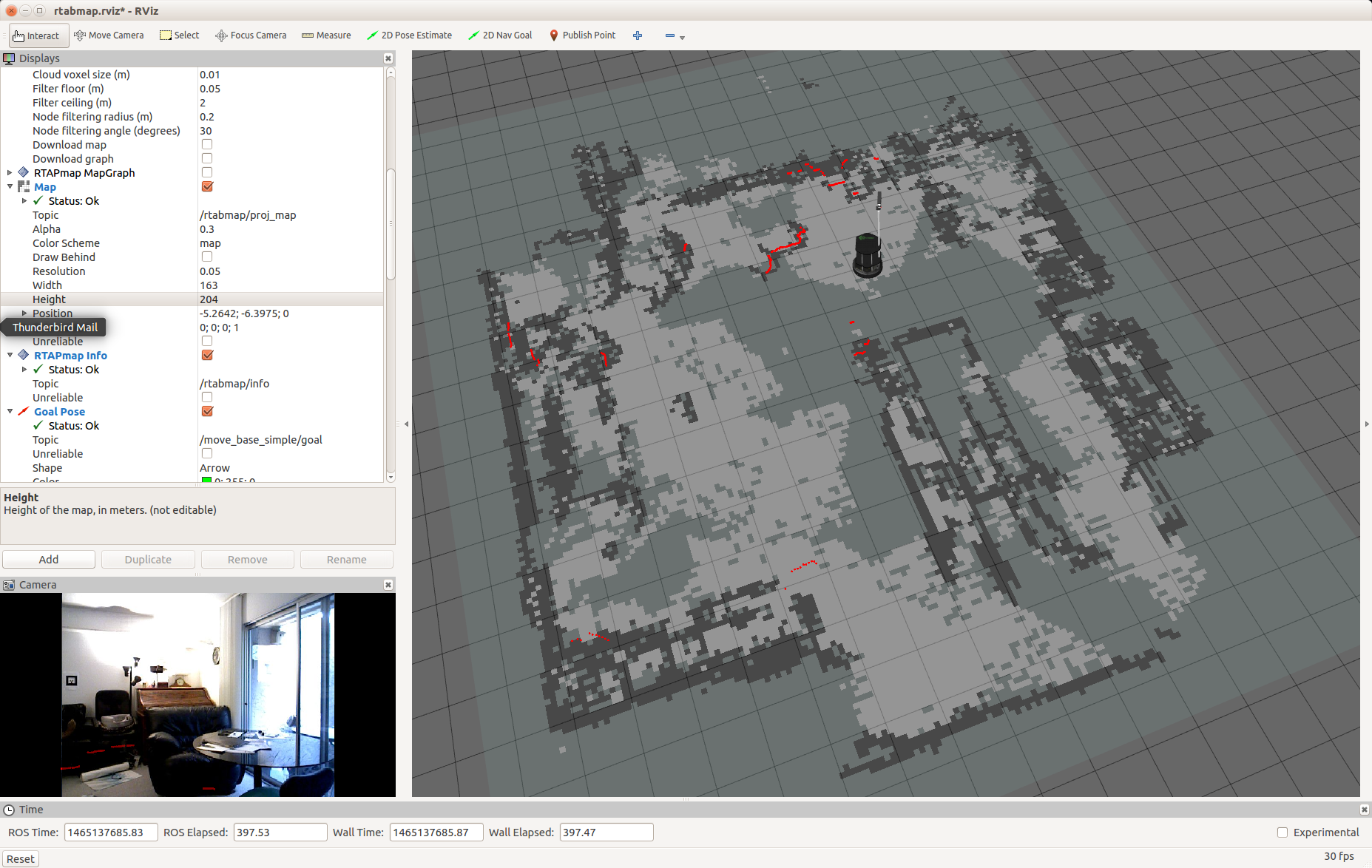
Any thoughts about what that white arc behind the robot is all about?
Thanks!
patrick
add a comment

