
republishing the data from publisher
Hi, I'm trying to subscribe the data from leddar/scan then publish it to rviz to compare after the median filtering the data will run off or not.
But after I collect it then publish it to rviz to visualize the data, it shows me a Vertical line compare to the leddar/scan visualize data.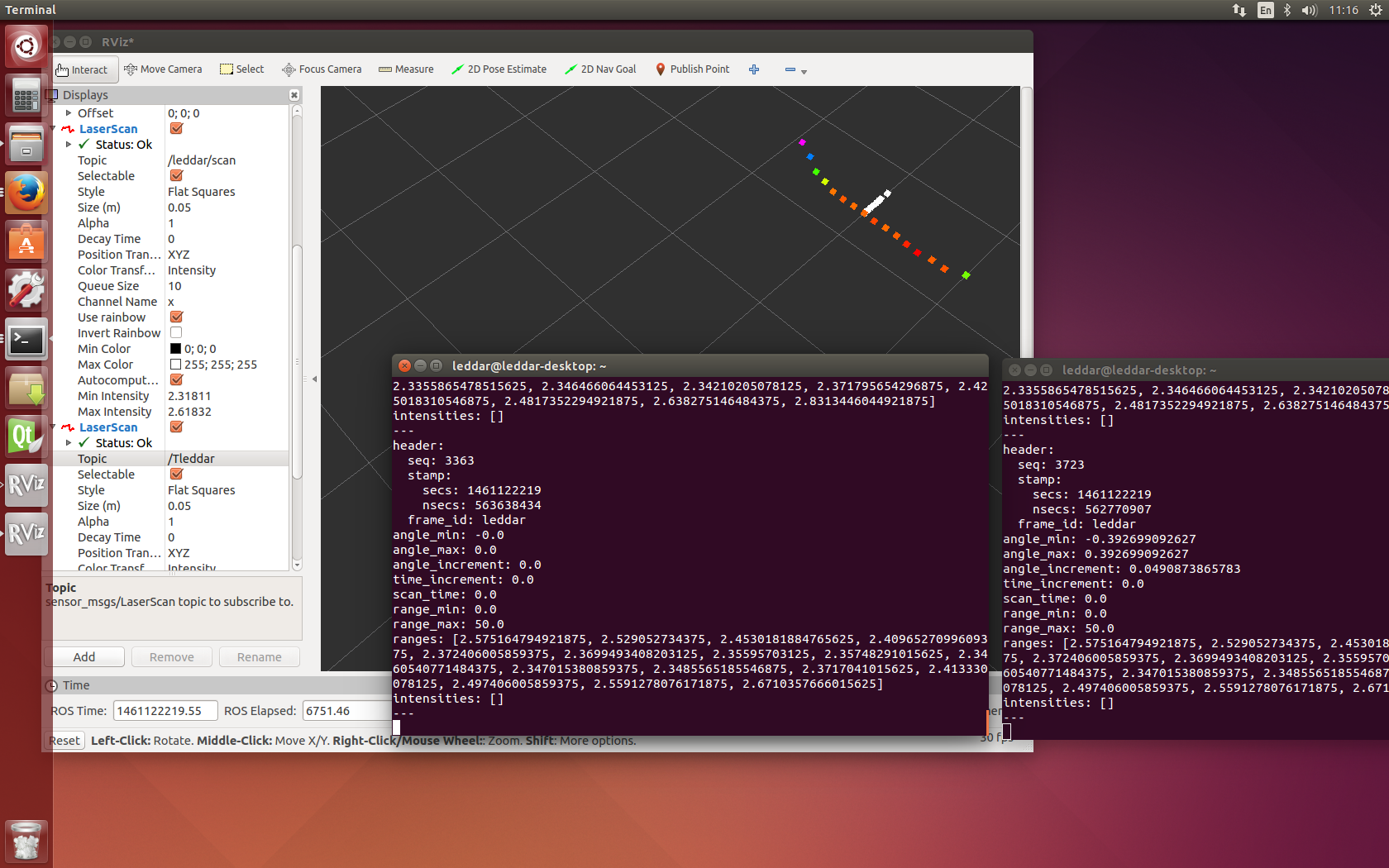 in the follow photo, the rainbow line is the leddar/scan and the white line is my collected then republish data.
in the follow photo, the rainbow line is the leddar/scan and the white line is my collected then republish data.
My question is how to let the republish data become same display way with original data? It's this due to I miss some parameter or my collect data way was wrong? I can share the original cpp file with you by this link: https://drive.google.com/open?id=0B6J... inside the leddar.cpp was the original package src, the Readleddar.cpp was I writing to subscribe the data.

