
Costmap2DROS transform timeout.Could not get robot pose, cancelling reconfiguration

Hi , I am doing an experiment about hector slam navigation.
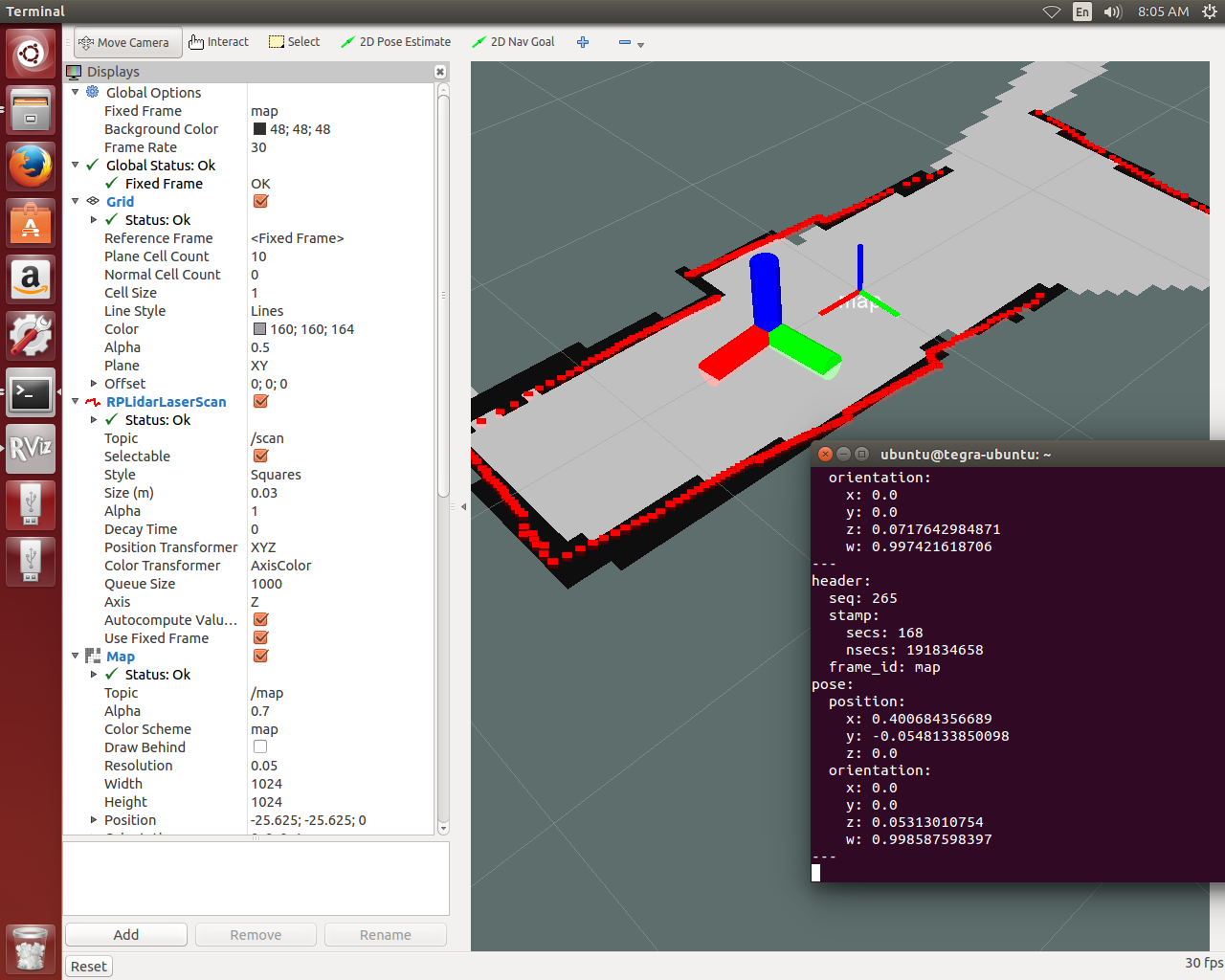
for the picture as below,the small tf mark is where it start and the big one is the last place .
here is my launch file (click me to github)
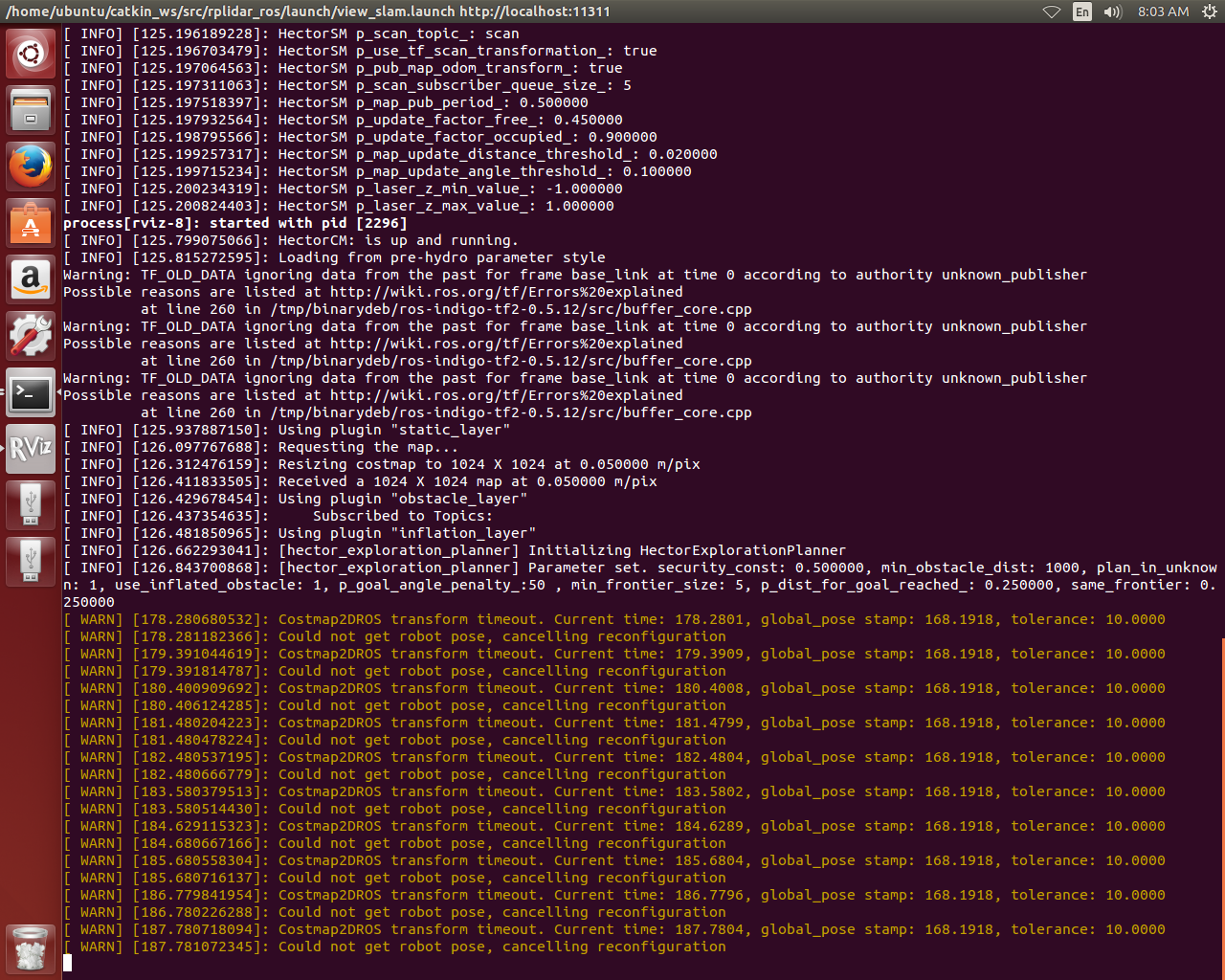
But the system crash when the laser scanner move every time about 10 seconds.
And shows Costmap2DROS transform timeout and can't get robot pose.
(update stauts 2016.02.27)
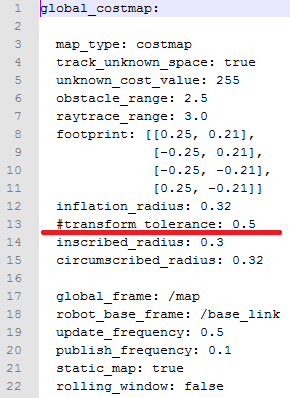
I guess this warning is because of the setting I modify.
I modify "hector_navigation/hector_exploration_node/config/costmap.yaml",change " transform_tolerance: 2 " to " transform_tolerance: 10".
How could I solve it? Thanks for anyone response.><
Here are the error message.
1000, plan_in_unknown: 1, use_inflated_obstacle: 1, p_goal_angle_penalty_:50 , min_frontier_size: 5, p_dist_for_goal_reached_: 0.250000, same_frontier: 0.250000
tolerance: 10.0000


Your tolerance for transforms is set to 10.000 meaning that the system will not use transform information that is more than 10 seconds old.Your system is not getting any new TF messages after 168.19 . Read about tf and do the tutorials - http://wiki.ros.org/tf , then update with more info
I make some test yesterday. I guess that SLAM system crash is not because of this warning. Maybe the system sway too much make it crash.But if I want to resolve this warning,should I study more about tf ?
Thanks for your response!!vaziri :) I update my question already.
did you fix this? im having troubles too