
The sbpl_lattice_planner is extending path unnecessarily

Hi, I'm using this fork with its sbpl package, for indigo. And created motion primitive file with genmprim_unicycle.m ( for forward, backward, turn-in-place, forward-turn-arcs) on Matlab.
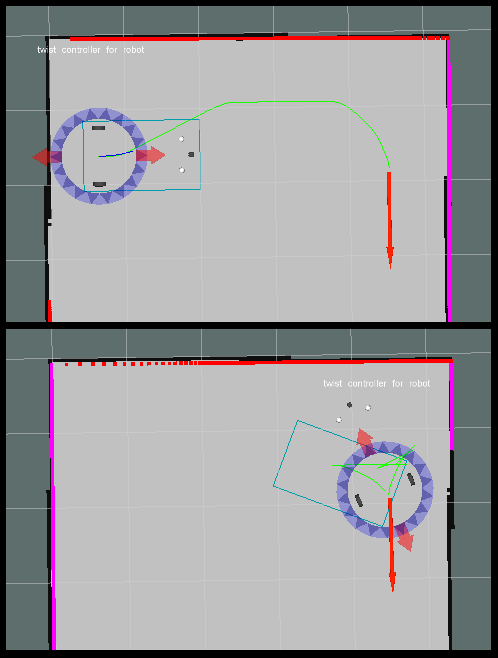
At the beginning, It computes path very well. But When the robot is near to end, planner is updating path with absurd one. And struggling with a bit left / right movements, here is image:
How can I solve this problem? And Here is its parameters:
SBPLLatticePlanner:
planner_type: "ARAPlanner"
allocated_time: 10.0
initial_epsilon: 2.83
environment_type: "XYThetaLattice"
forward_search: false
primitive_filename: "" # Setting in launch file
force_scratch_limit: 500
nominalvel_mpersecs: 0.4
timetoturn45degsinplace_secs: 0.6
Thank You.

And Footprint Rectangle is coming late.
It looks like your robot is starting in one orientation, and ending in the opposite orientation somehow. Does it track the path well?
No,
dwa_local_plannerfollows path at the beginning only. I'll increase itspath_distance_bias. I'll write after this, I'm on mobile now.But global plan is changing fast.
dwa_local_planner cannot follow the backing maneuvers that SBPL generates; it will get confused by them and command the robot to turn or move in the wrong direction. I strong suggest you use a different local planner.
I can configure
dwa_local_plannerfor following path at the beginning, here is why I'm usingdwa_local_planner.And Thank you sir. What's your best suggestion for global and local planner? Here is my other question for my robot's motion.
I'm not aware of any good local planners for this. This may be a good starting point, but it needs a lot of work.