
hector_slam w/ Hokuyo UTM-30LX breaks map when scanning chain link fence
While testing our Hokuyo UTM-30LX with hector_slam, I ran into a peculiar problem. Every time I attempt to walk up to or along a chain-link fence, hector_slam gets confused and basically "wobbles" around the position where it first encounters the fence.
So, if the fence is 6 feet long, it basically cuts the 6 feet down to 0ft and only continues mapping after I have passed the section of chainlink fence.
Obviously the laser is occasionally hitting the thin wires of the fence and more often passing between them, and this is confusing the algorithm.
Is there a way to fix this? Perhaps it is by setting the Hokuyo's parameters differently (possibly the cluster parameter) or by changing the hector_mapping parameters...
We have also run into problems where a door opening or closing will break the map (I passed through a door opening it 60 degrees to walk through, and after I walked through when the door swung closed, it bent the map by 60 degrees). But this is not really a problem to be solved, since it is a moving object that just happens to look like a wall.
Thanks in advance!
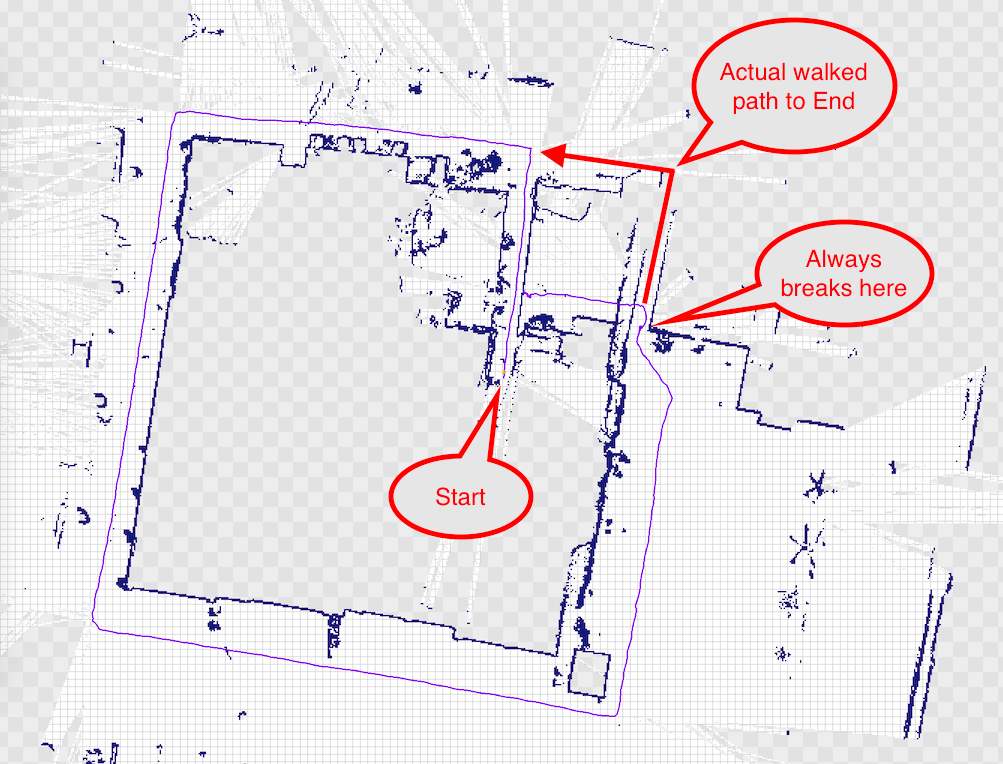
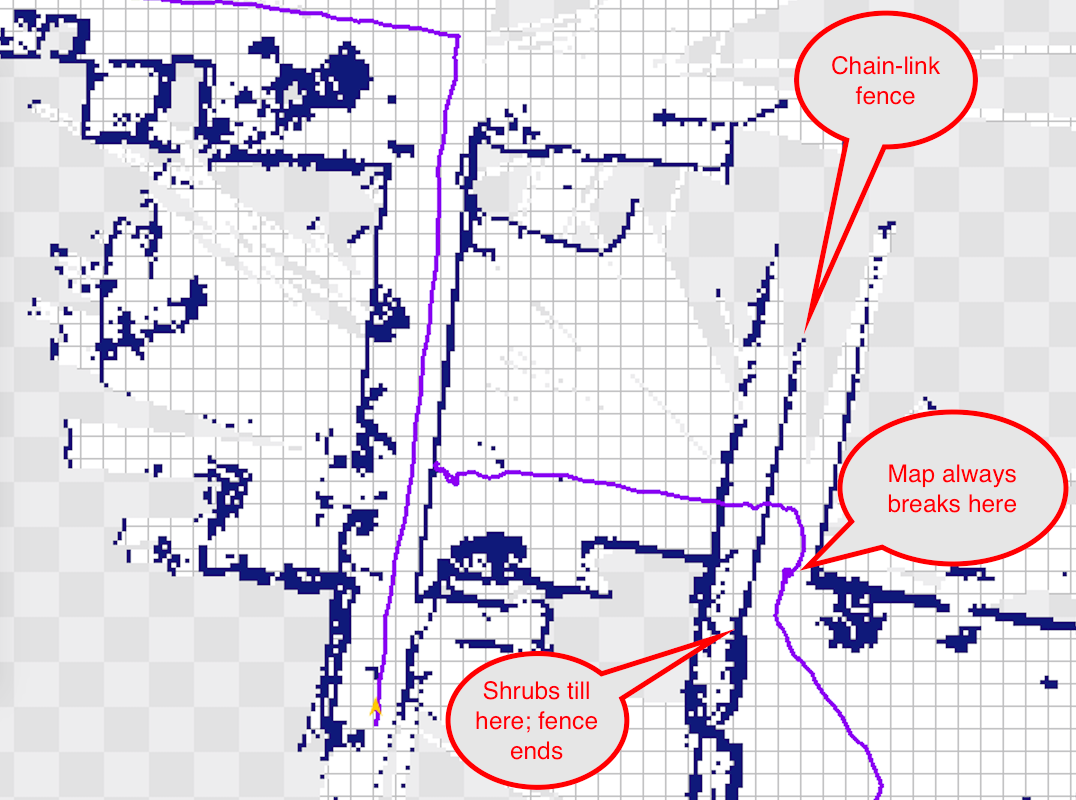
EDIT: added photos/maps per Stefan's request. We have done five runs just like the above and had the map break at almost exactly the same point every time. The little purple "knot" where the "Always breaks here" bubble points is where the trajectory "wobbles" for a while until I get all the way to end of the walkway, after which it begins mapping properly again (but short about 6 feet).



Can you provide a screenshot of the mapping process and/or photo of the environment?
Sure thing. I added the photos. I can post the launch files too, but they are fairly close to the defaults for hector_slam and hokuyo_node. The only big changes are skip = 0 (Hokuyo runs at 40Hz) and map_resolution = 0.100 (works best for our purposes, but we are open to change this if needed).