I tried the bag with your modified rgbd_mapping.launch. Did you record the bag with only realsense_r200_launch.launch? If yes, the realsense camera node publishes already transforms /realsense_frame->/camera_depth_optical_frame and /realsense_frame->/camera_color_optical_frame. The warning you are getting is because there are static_transform_publishers publishing also the same transforms when launching rgbd_mapping.launch.
Use this:
<!-- Frames: tf -->
<node pkg="tf" type="static_transform_publisher" name="base_to_realsense"
args="0 0 0 -1.5707963 0 -1.5707963 /base_link /realsense_frame 100" />
instead of
<!-- Frames: tf -->
<node pkg="tf" type="static_transform_publisher" name="base_to_color"
args="0 0 0 -1.5707963 0 -1.5707963 /base_link /camera_color_optical_frame 100" />
<node pkg="tf" type="static_transform_publisher" name="color_to_depth"
args="-0.1325 -0.1975 0.0 -1.570796327 0.0 0.0 /camera_color_optical_frame /camera_depth_optical_frame 100" />
So with your rosbag:
$ rosbag info 2016-01-18-16-14-41.bag
topics: /camera/color/camera_info 555 msgs : sensor_msgs/CameraInfo
/camera/color/image_raw/compressed 554 msgs : sensor_msgs/CompressedImage
/camera/depth/image_raw/compressedDepth 555 msgs : sensor_msgs/CompressedImage
/tf 1110 msgs : tf2_msgs/TFMessage
Launch the example like that:
$ roslaunch rgbd_mapping.launch rgb_topic:=/camera/color/image_raw depth_registered_topic:=/camera/depth/image_raw camera_info_topic:=/camera/color/camera_info frame_id:=base_link rtabmap_args:="--delete_db_on_start" estimation:=1 compressed:=true
$ rosparam set use_sim_time true
$ rosbag play --clock 2016-01-18-16-14-41.bag
The warning may apppear on start 2-3 times but after it is ok:
[ INFO] [1453176055.454777214]: rtabmap 0.10.12 started...
[ WARN] [1453176067.382156280, 1453162481.896671693]: odometry: Could not get transform from base_link to camera_color_optical_frame (stamp=1453162481.777381) after 0.100000 seconds ("wait_for_transform_duration"=0.100000)!
[ WARN] [1453176067.479223601, 1453162482.000379765]: odometry: Could not get transform from base_link to camera_color_optical_frame (stamp=1453162481.886188) after 0.100000 seconds ("wait_for_transform_duration"=0.100000)!
[ INFO] [1453176067.531584531]: Odom: quality=0, std dev=1.000000m, update time=0.042757s
[ INFO] [1453176067.700283209]: Odom: quality=30, std dev=0.182574m, update time=0.141564s
[ INFO] [1453176067.835296760]: rtabmap: Rate=1.00s, Limit=0.000s, RTAB-Map=0.3025s, Pub=0.0020s (local map=1, WM=1)
[ INFO] [1453176067.874122050]: Odom: quality=65, std dev=0.124035m, update time=0.150594s
Here some screenshots:

cheers



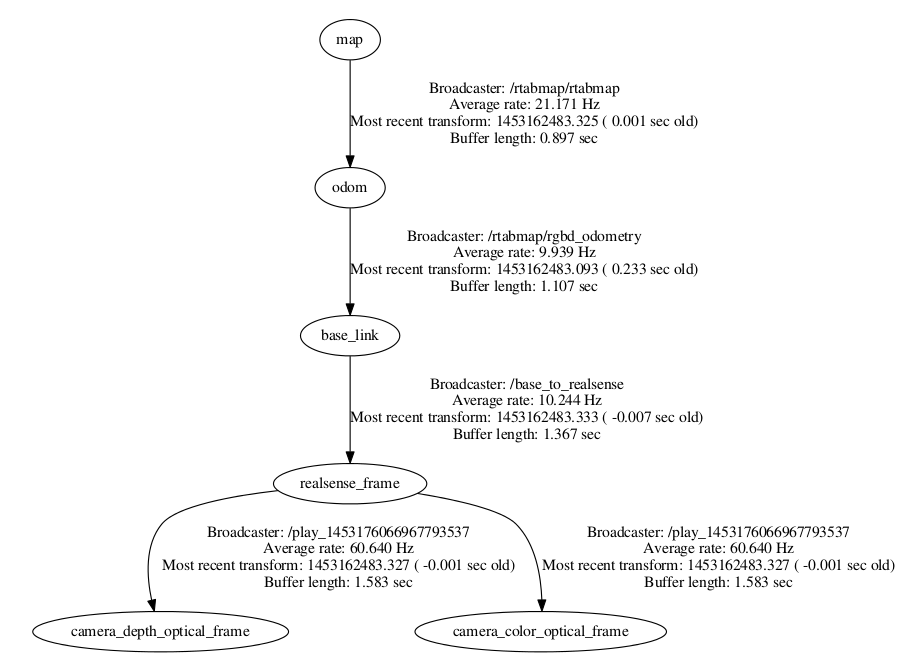
Can you add the TF tree to your question?
$ rosrun tf view_frames$ evince frames.pdfI don't have the right to attach, shared the frames.pdf in google drive: https://drive.google.com/open?id=0B2p...
Thank you very much !
The realsense_frame is not connected to TF tree. What is your launch file, or commands used? Normally, if you have RGB image + Registered depth image + RGB camera info topics and corresponding frames in TF, you should be good to map.
I just attached the files I used, i thought I was following your advices in http://answers.ros.org/question/21895... Thank you. Maybe I miss something.