
Is faked odometry accurate enough for navigation?
Hi fellows,
I am building my own robot. At the moment is properly mounted and it is on the point of work, but I need some help.
Currently I can navigate with teleop as I say in this post and I am getting the odometry from the velocity commands that I am sending.
I am using a map that I have created with turtlebot and I am using the kinect from it for the navigation. I am getting this with rqt_graph:

And this are my tfs:
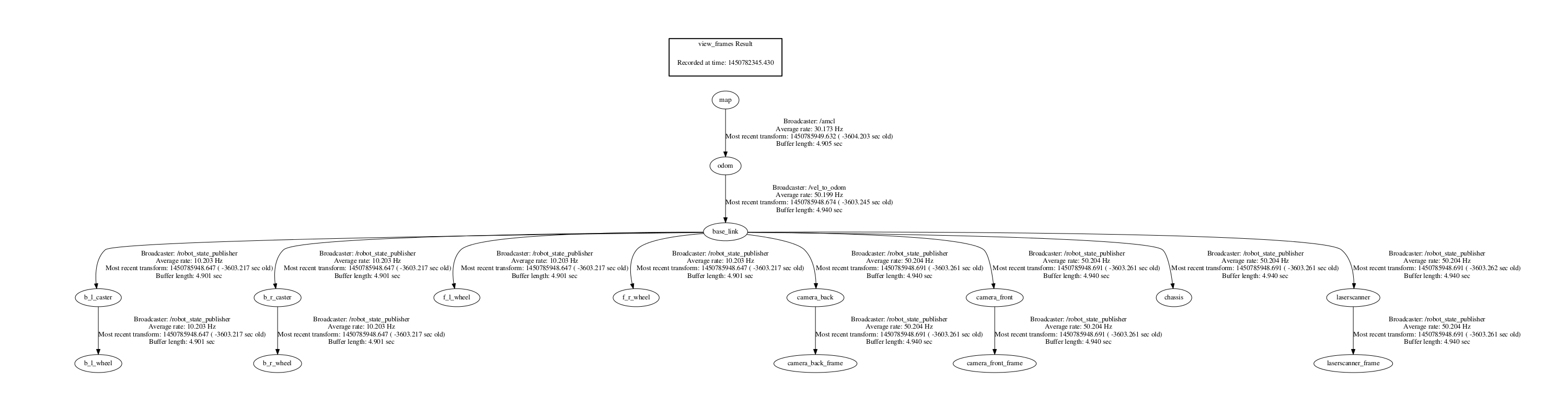
Everything seems to be fine but I am having some problems with the navigation.
- The model in rviz doesn't move as my robot (maybe the fake odometry is causing this?)
- The navigation showing some warnings and I don't now how to fix them:
[ WARN] [1450786176.810782102]: Control loop missed its desired rate of 20.0000Hz... the loop actually took 0.1497 seconds
[ WARN] [1450786176.811294763]: Map update loop missed its desired rate of 5.0000Hz... the loop actually took 0.3290 seconds
[ WARN] [1450786176.977892275]: Map update loop missed its desired rate of 5.0000Hz... the loop actually took 0.2961 seconds
[ WARN] [1450786176.979343259]: Control loop missed its desired rate of 20.0000Hz... the loop actually took 0.1686 seconds
[ WARN] [1450786177.112602636]: Control loop missed its desired rate of 20.0000Hz... the loop actually took 0.1332 seconds
...
[ERROR] [1450786205.617068098]: Aborting because the robot appears to be oscillating over and over. Even after executing all recovery behaviors
I've been trying changing the parameters of the planner, the global costmap, the local costmap and I didn't get nothing. Here you can take a look to the parameters I am using: Params_Github
I know that the laser_scan is working, the local costmap and global costmap also.

I think that the problem is in the local planner but I don't know where. Or perhaps the fake odometry made with the command velocity is not accurate enough?
Do you have any idea about to how resolve this? Is necessary to change anything else?
Edit:
I tried:
- Reducing the resolution of costmaps.
- Reducing the width and height of the local costmap.
- Reducing vx_samples and vtheta_samples (4 and 10 respectively).
- Reducing controller_frequency (5Hz).
As I've read others answers, but isn't working.

{kind=link}
{kind=link}
I think your "rqt_graph bigger link" is wrong - still shows the graph
Fixed, thanks!
@solosito: please don't post answers when you're not actually answering your question. For updated, just add the new info to your original post. Use the edit button/link for that.