
AMCL acceptable robot speed
I am using amcl. my robot speed is 40 cm/sec. AMCL probability estimation is good and But robot is losting on gmapping map. you think problem about speed value ???
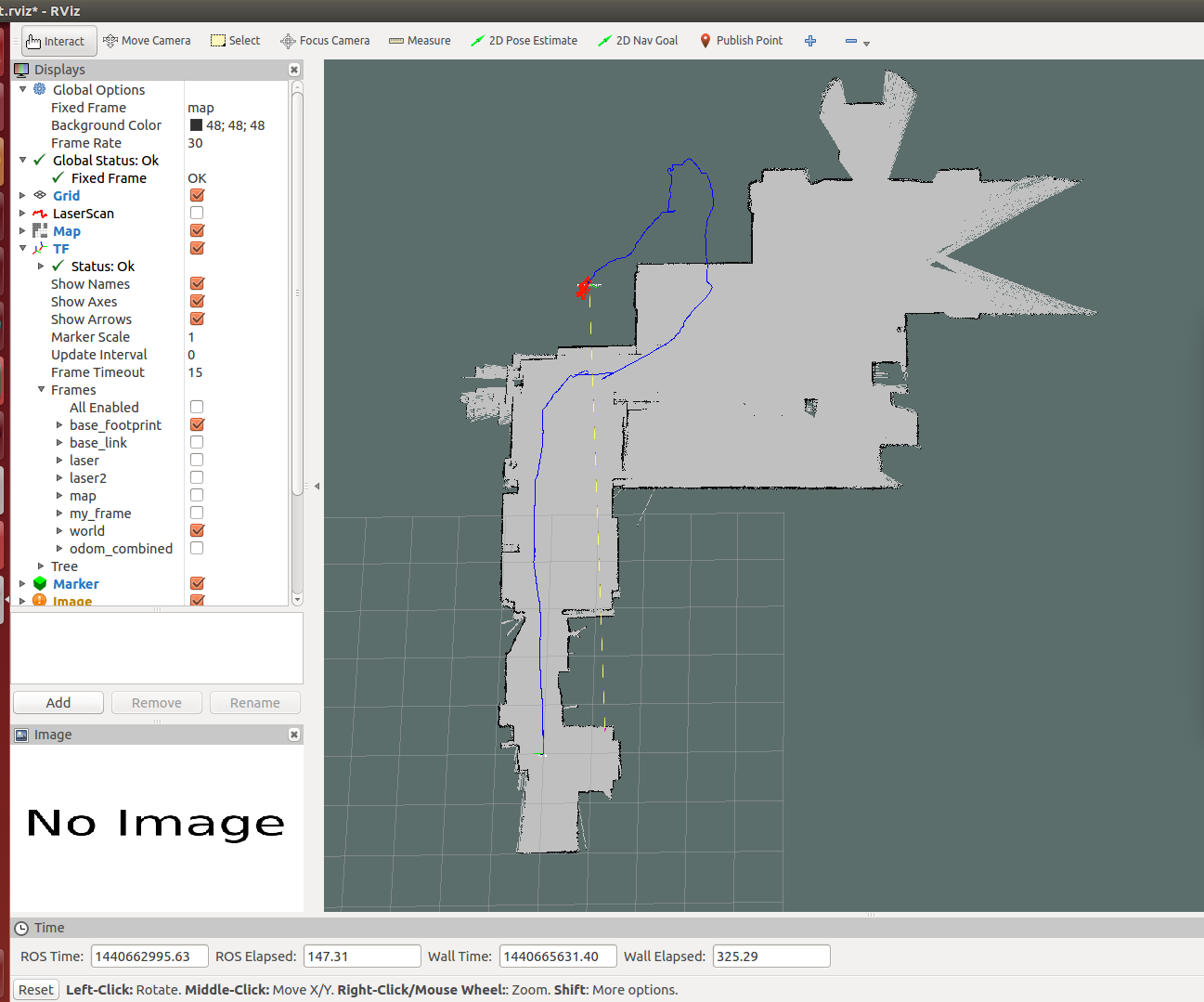
my problem : ( I used 2d pose estimation button for initial pose )

Hi, glad to meet you here. I now use amcl too. I want to build a map using slam_gmapping and amcl. Now, I could run the two node in one launch file. But the generated map is not that good and I could not get the path when moving the rplidar. Could you give me some comments? Thanks!
but you need to ask a new question on forum. your issue is not dealing with this topic. I wrote a node for rplidar odometry path using visualization marker tools. Its not important thing.