
ar_track_alvar pose not returned
Hello folks,
I am tring to use the AR_TRACK_ALVAR (version 0.5.1) on my Indigo version with Ubuntu 14.04.1 64 bits.
I already have used this package on Fuerte and it works perfectly. However, I have experienced some drawbacks on Indigo version.
I get it on git repository and compile, and these steps goes ok.
When I show the markers, the node (individualMarkersNoKinect) identifies the tagIDs, but the package can't estimate its positions and orientations (it present only zeros).
I'm using the usb_cam package as I did on Fuerte.
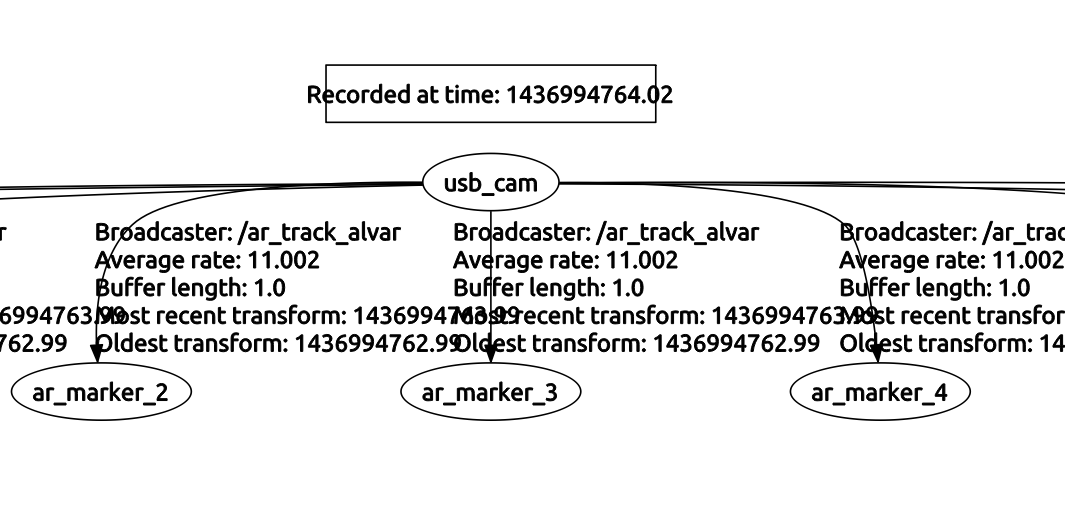
I already look my TF Tree and saw that everything probably runs OK, as in the image:
I did calibration of the camera adjusting the KDRP parameters and I had succesful on this step.
This is the launch file that I have used.
<launch>
<!--node pkg="rviz" type="rviz" name="rviz" args="-d $(find ar_track_alvar)/launch/configRVIZalvar.vcg"/-->
<!--node pkg="tf" type="static_transform_publisher" name="mav_to_camera" output="screen" args="0 0 0 0.785398163 0 0 mav camera 10" /-->
<node name="usb_cam" pkg="usb_cam" type="usb_cam_node" respawn="false" output="log">
<param name="video_device" type="string" value="/dev/video0"/>
<param name="camera_frame_id" type="string" value="usb_cam"/>
<param name="io_method" type="string" value="mmap"/>
<param name="image_width" type="int" value="640"/>
<param name="image_height" type="int" value="480"/>
<param name="pixel_format" type="string" value="yuyv"/>
<param name="autofocus" type="bool" value="true"/>
<rosparam param="D">[0.04159391916702457, -0.12163937082225258, -0.004713340469508146, -0.004730416919270597, 0.0]</rosparam>
<rosparam param="K">[608.5325779623342, 0.0, 320.5441970917403, 0.0, 604.9140000188461, 226.22581167824686, 0.0, 0.0, 1.0]</rosparam>
<rosparam param="R">[1.0, 0.0, 0.0, 0.0, 1.0, 0.0, 0.0, 0.0, 1.0]</rosparam>
<rosparam param="P">[609.3626098632812, 0.0, 317.55791508550465, 0.0, 0.0, 606.815673828125, 224.0848441260896, 0.0, 0.0, 0.0, 1.0, 0.0]</rosparam>
</node>
<arg name="marker_size" default="4.4" />
<arg name="max_new_marker_error" default="0.08" />
<arg name="max_track_error" default="0.2" />
<arg name="cam_image_topic" default="/usb_cam/image_raw" />
<arg name="cam_info_topic" default="/usb_cam/camera_info" />
<arg name="output_frame" default="usb_cam" />
<node name="ar_track_alvar" pkg="ar_track_alvar" type="individualMarkersNoKinect" respawn="false" output="screen" args="$(arg marker_size) $(arg max_new_marker_error) $(arg max_track_error) $(arg cam_image_topic) $(arg cam_info_topic) $(arg output_frame)"/>
</launch>
By this description, can you tell what is going wrong or what am I missing?
Thank you.

Can you edit your question to add the version of software you use? E.g.
dpkg -p ros-indigo-ar-track-alvar?Greetings, we didn't install it with apt-get. We download the package with GIT using the URL informed at the ROS website: https://github.com/sniekum/ar_track_a... We compile it with catkin. The version in the manifest package.xlm is "0.5.1".
it has been edited with the version of the ar_track_alvar