
octomap_server
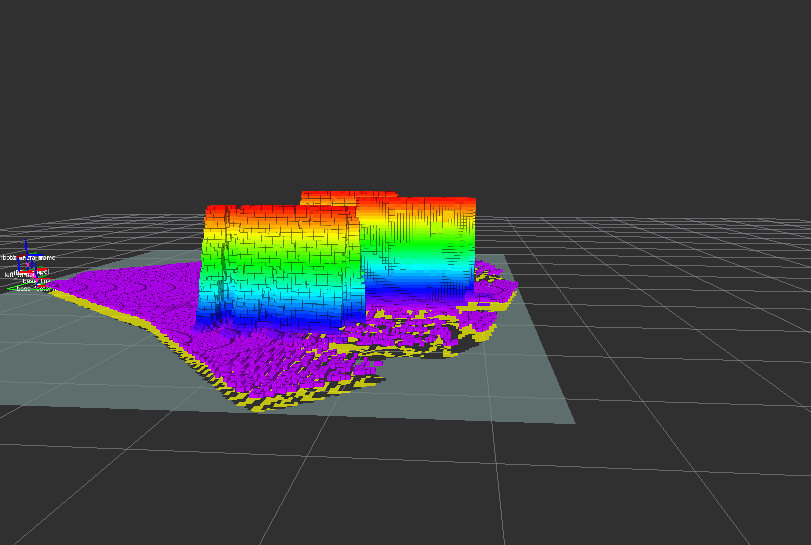
This image is generated in rviz there are three cones. Over time the the system drifts as shown below. The robot is not moved. Any idea on what is causing this drift? This is from a simulation in Gazebo under Indigo. Would this drift be a results of bad odometry? I am using an IMU and robot odometry in ekf and a kinetic camera in simulation.
add a comment
