
xtion depth_image to point_cloud
Hi All,
Now I know I missing something supid here - I#m usnig the launch script below to convert the depth_image into a point cloud. What am I missing. The service starts but my topics aren't linking up
UPDATE:
I've updated the launch file to make it simpler
<launch>
<!-- Nodelet manager for this pipeline -->
<node pkg="nodelet" type="nodelet" args="manager" name="depth_transforms_manager" output="screen"/>
<!-- Convert to point cloud -->
<node pkg="nodelet" type="nodelet" name="cloudify" args="load depth_image_proc/point_cloud_xyz depth_transforms_manager --no-bond">
<!-- Input: Camera calibration and metadata. (sensor_msgs/camera_info) -->
<remap from="camera_info" to="/openni2_camera/depth/camera_info"/>
<!-- Input: Rectified depth image, registered to the RGB camera. (sensor_msgs/Image) -->
<remap from="image_rect" to="/openni2_camera/depth/image_raw"/>
<!-- Output: XYZ point cloud. If using PCL, subscribe as PointCloud<PointXYZ>. (sensor_msgs/PointCloud2) -->
<remap from="points" to="/openni2_camera/depth/points"/>
</node>
</launch>
This are the available topics
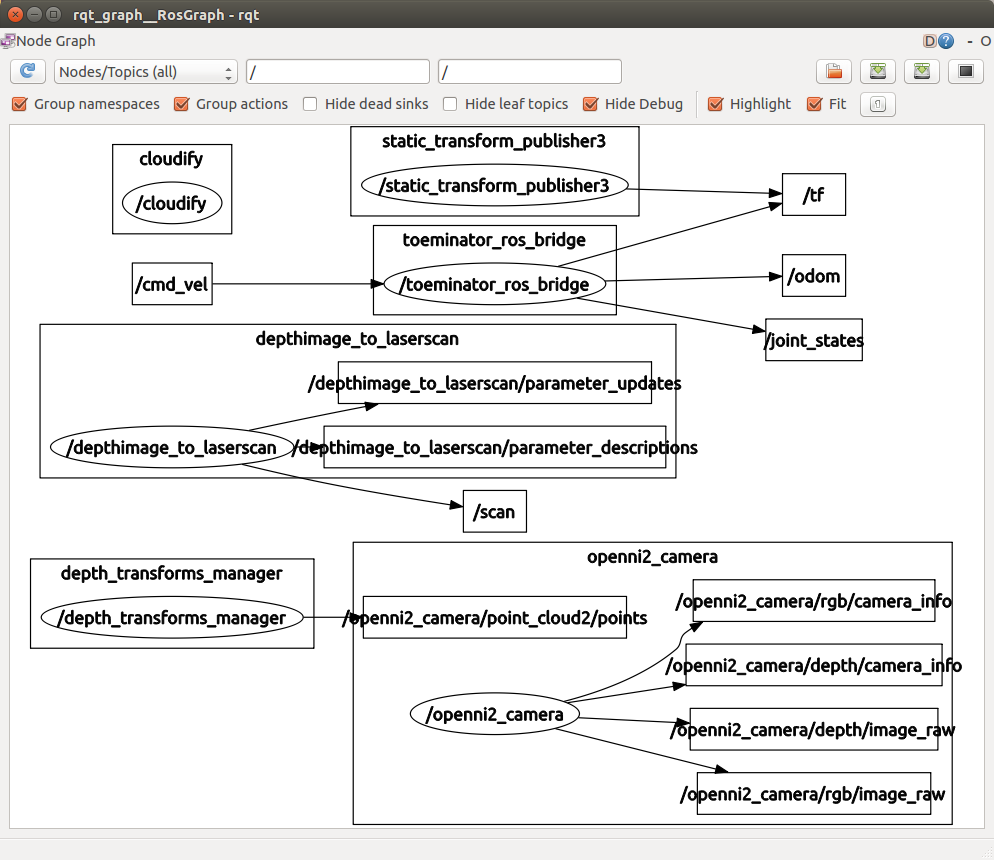
UPDATE: And now I can see Cloudify and the depth_transform_manager
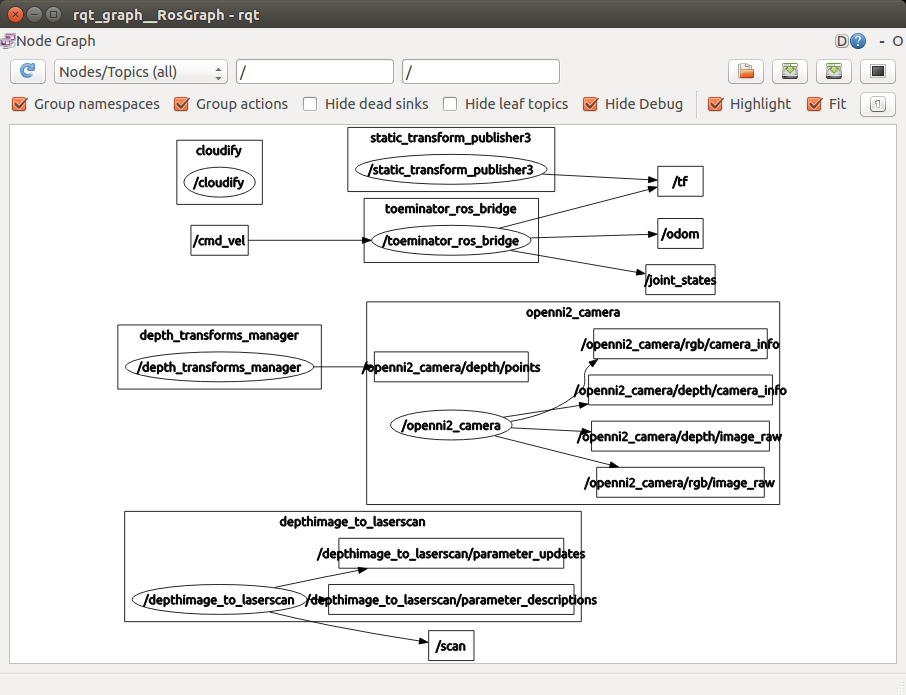
However I there is no connectivity between the depth_transform_manager and the openni2_camera depth topics and I can't see why not? camera_info and image_rect should be remapped to /openni2_camera/depth/camera_info and /openni2_camera/depth/image_raw respectively.
Any suggestions?
Many Thanks
Mark

Maybe you need to add a forward slash at the beginning of the topic names?
Hi, did you manage to solve this problem?
@jpgc - no unfortunately. If you find a solution please let me know
@MarkyMark2012 i didn't find a solution but i managed to do the conversion in another way.
@jpgc - could you let me know. Cheers
Sure, i found this script to do the conversion and this one.