
How to add move_base node in a crowd simulator
A simulator for crowded Pedestrian in ROS is pedsim_ros . However, this simulator doesn't have navigation package for a robot. So I am considering to add one into it. To do this, another simulator navigation_stage using move_base and stage_ros is referred.
A figure from rqt_graph that shows running nodes from navigation_stage is shown below.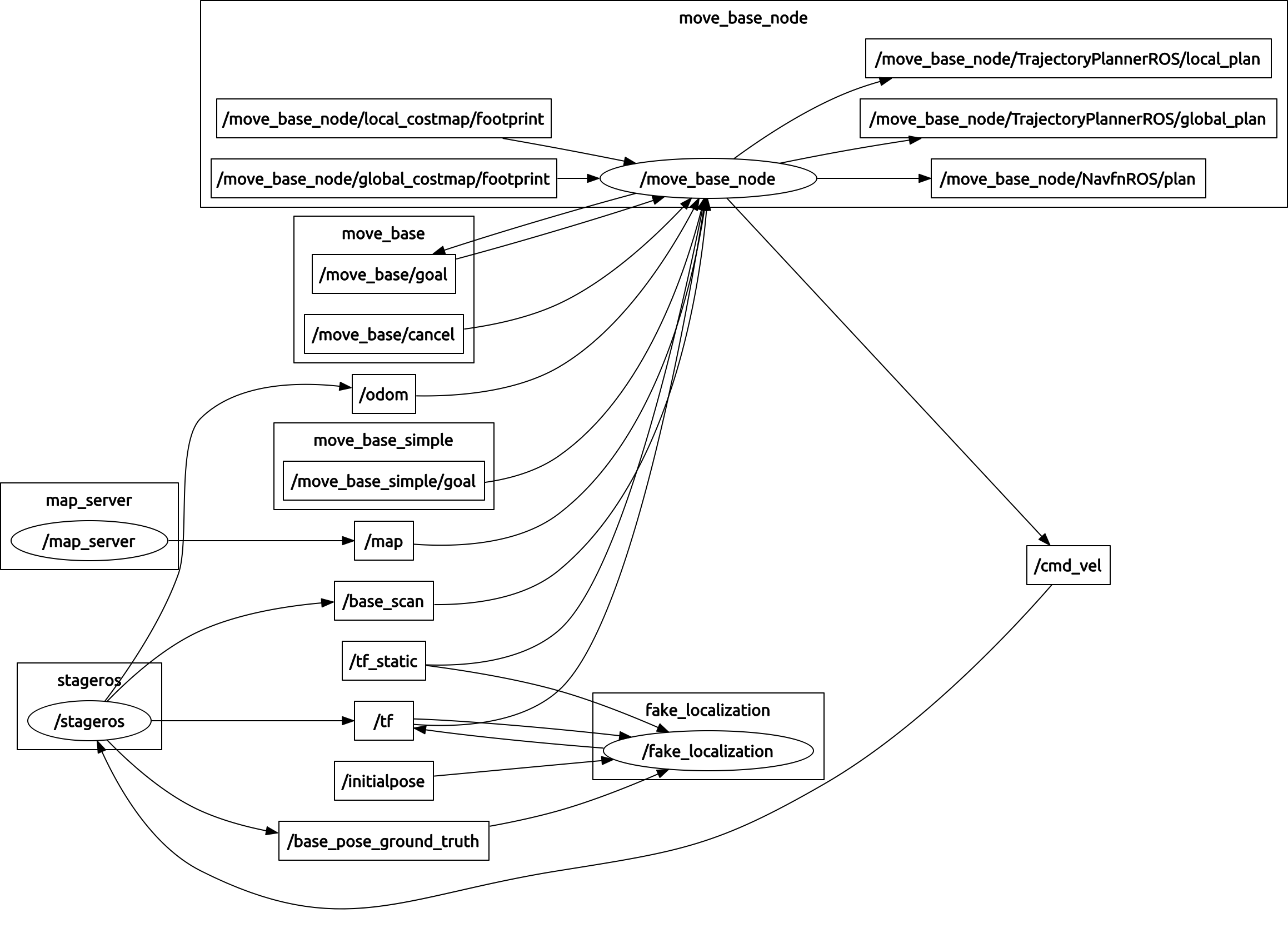
From above figure, stageros will be replaced with pedsim_ros.
I think some topics /odom /base_pose_ground_truth /tf can be simulated in Pedsim_ros. So now I have two questions:
1, how to simulate topic /base_scan and sensor information is not need in pedsim_ros for now. Can I simulate the movement of a robot using move_base without /base_scan.
2, how the move_base get the simulate robot in Rviz. The pedsim_ros depends on the rviz. A .dae file is used as 3D shape of the robot. Unlike a simulated turtlebot which has its own tf tree, this simulated robot doesn't has its own tf tree. Then how the move_base drives this 3D shap move? Is a 2D postion (x, y) within frame like "base_footprint" enougth?
Looking forwards to any advices. Thanks Hopefully, one of the authors of pedsim_ros @makokal and @Procópio Silveira Stein who also found pedsim_ros could give me advices. Thank!
