
How to hide joint axis in Rviz
How do you hide the joint axis in Rviz, or at least make them translucent or smaller so they don't hide your model?
I have a model consisting of a box with a single thin "leg", but the joint axis indicators for the leg are so big, they're obscuring the leg.
<?xml version="1.0"?>
<robot name="myrobot"
xmlns:xacro="http://www.ros.org/wiki/xacro">
<!-- Included URDF/XACRO Files -->
<xacro:include filename="$(find myrobot_description)/urdf/materials.urdf.xacro" />
<!-- width in meters -->
<property name="torso_x_size" value="0.1" />
<!-- length in meters -->
<property name="torso_y_size" value="0.205" />
<!-- height in meters -->
<property name="torso_z_size" value="0.03" />
<!-- torso mass (not including legs) in kg -->
<property name="torso_mass" value="0.920" />
<!-- mass of a single upper leg piece in kg -->
<property name="upper_leg_mass" value="0.010" />
<link name="base_link">
<visual>
<geometry>
<box size="${torso_x_size} ${torso_y_size} ${torso_z_size}" />
</geometry>
<material name="red"/>
</visual>
<xacro:default_inertial mass="${torso_mass}"/>
</link>
<xacro:macro name="leg" params="name reflect_x reflect_y">
<link name="${name}">
<visual>
<geometry>
<box size="0.003 0.04 0.005" />
</geometry>
<origin xyz="0 0.04 0" rpy="0 0 0"/>
<material name="blue" />
</visual>
<collision>
<geometry>
<box size="0.003 0.04 0.005" />
</geometry>
<origin xyz="0 0.04 0" rpy="0 0 0"/>
</collision>
<xacro:default_inertial mass="${upper_leg_mass}"/>
</link>
<joint name="torso_to_${name}" type="fixed">
<parent link="base_link"/>
<child link="${name}"/>
<origin xyz="${torso_x_size/2*reflect_x} ${torso_y_size/2*reflect_y} 0" />
</joint>
</xacro:macro>
<xacro:leg name="front_right_leg" reflect_x="1" reflect_y="1" />
</robot>
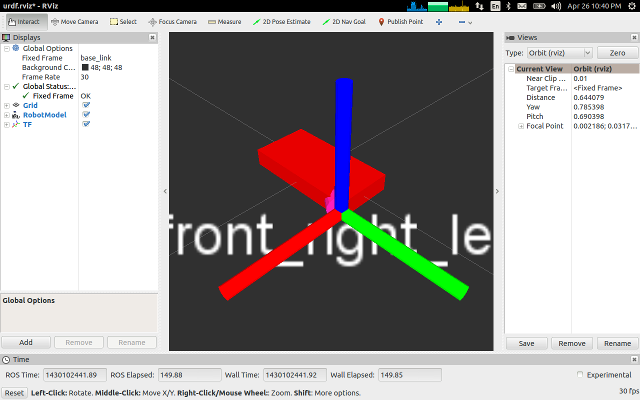
The default leg position puts it right where the green cylinder is, which, as you can see, completely obscures it.
add a comment

