
How can I communicate ros/gazebo and other app to transfer data? [closed]
Hi ROS users: I am using Ros indigo, Gazebo2 and linux 14.04.
I would like to know how I can communicate simulink (that this application is in PC A) and Ros/gazebo (that this application is in PC B). So I have to sent velocities to my robot p3dx in simulink where my model robot is a driver. And I have to get that this driver to communicate with ROS and then I will see a representation of my model p3dx in gazebo qith these velocities. Here it is a image that I want to do that:
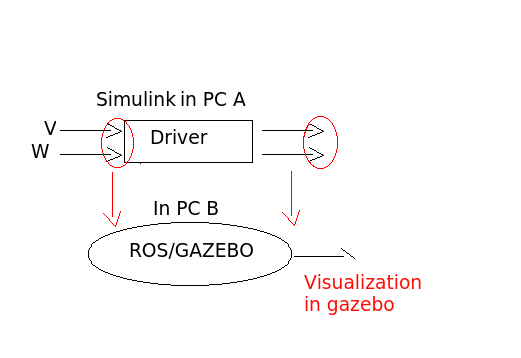
I have the driver and I have the model P3DX package of ROS/Gazebo. So I have to sent velocities in simulink from PC A and then automaticaly Gazebo has to represent the simulation of my robot.
How can I do that? Help me please. Thanks

Isn't this a duplicate of Is there anyway to comunicate Simulink and Ros/Gazebo??
I don´t think so. In this way I think is easier to develop the task, with driver.