
pointcloud_to_laserscan rotation of scan line
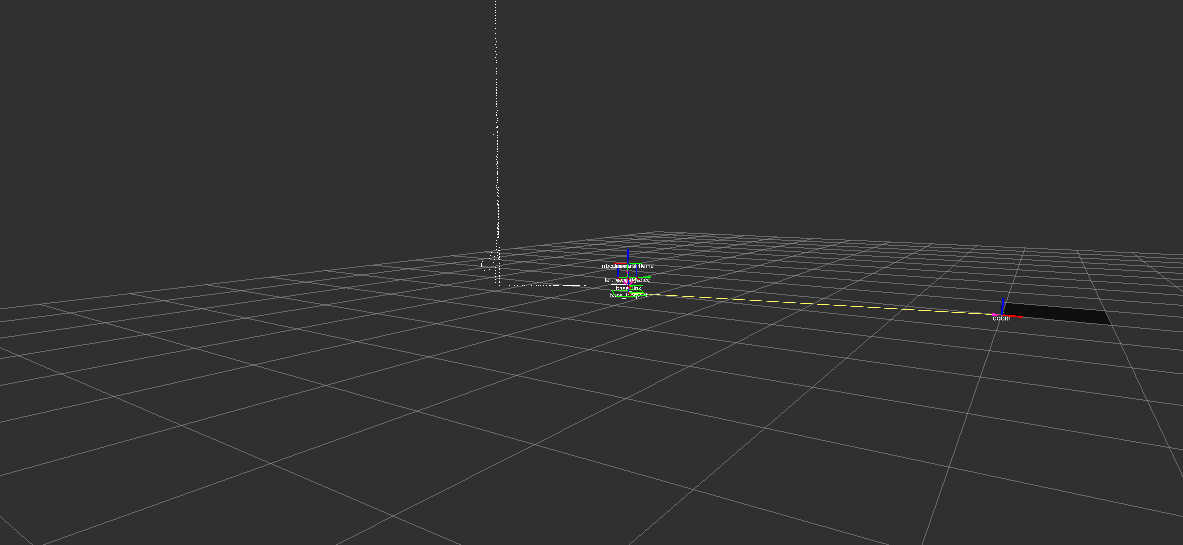
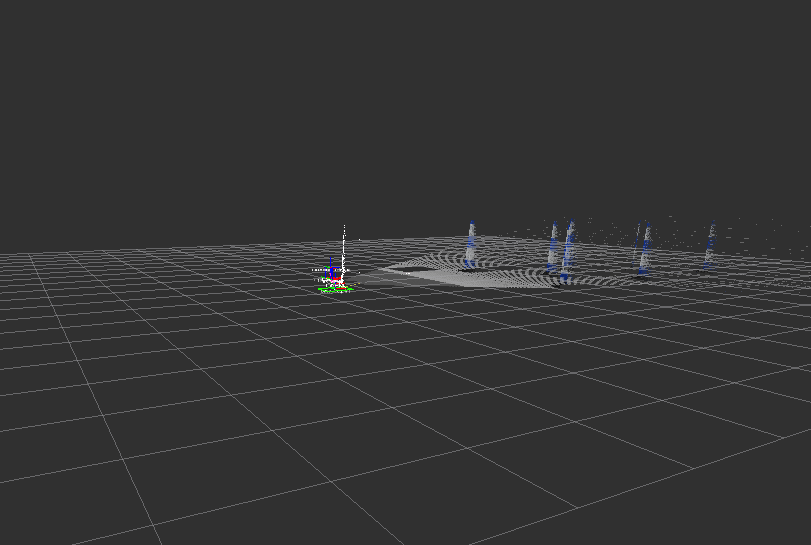
I am running pointcloud_to_laserscan . When I display the pointcloud2 in rviz after rotation the camera frame is displays correctly along the rviz ground plane. However the laser from pointcloud_to_laserscan produces a scan line that does not register to the cloud2 in rviz .
from rostopic list
/camera_info
/clicked_point
/clock
/cmd_vel
/depth/image_raw
/depth/points
/gazebo/link_states
/gazebo/model_states
/gazebo/parameter_descriptions
/gazebo/parameter_updates
/gazebo/set_link_state
/gazebo/set_model_state
/gmapping_node/entropy
/image_raw
/image_raw/compressed
/image_raw/compressed/parameter_descriptions
/image_raw/compressed/parameter_updates
/image_raw/compressedDepth
/image_raw/compressedDepth/parameter_descriptions
/image_raw/compressedDepth/parameter_updates
/image_raw/theora
/image_raw/theora/parameter_descriptions
/image_raw/theora/parameter_updates
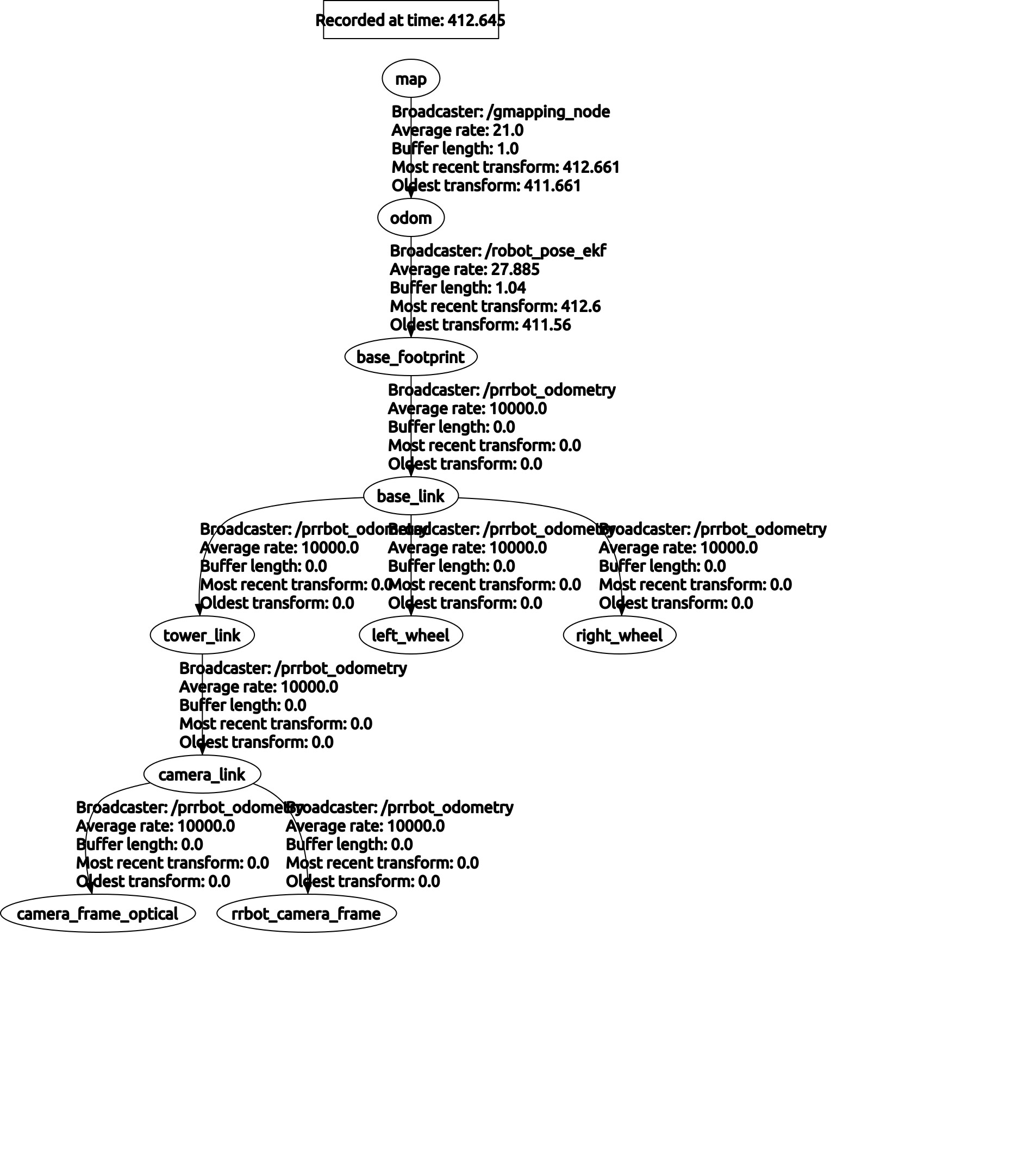
self.msgAry = [self.createStaticTransform("base_footprint", 0, 0, 0.1, "base_link", 0, 0, 0), \
self.createStaticTransform("base_link", -0.13, -0.13, 0.1, "left_wheel", 0, 0, 0), \
self.createStaticTransform("base_link", -0.13, 0.13, 0.1, "right_wheel", 0, 0, 0), \
self.createStaticTransform("base_link", -0.1, 0, 0.1, "tower_link", 0, 0, 0), \
self.createStaticTransform("tower_link", 0.0, 0, 0.2, "camera_link", 0, 0, 0), \
self.createStaticTransform("camera_link", 0, 0, 0, "camera_frame_optical", 0, 0, 0), \
self.createStaticTransform("camera_link", 0, 0, 0, "rrbot/camera_frame", -1.57079633, 0, -1.57079633)]
self.pub_tf.publish(self.msgAry)
<!-- ******************************************************************************************** -->
<node name="pointcloud_to_laserscan_node" pkg="pointcloud_to_laserscan" type="pointcloud_to_laserscan_node" output="screen" respawn="true">
<remap from="cloud_in" to="/depth/points"/>
<rosparam>
target_frame: "camera_frame_optical"
tolerance: 0.01
min_height: 1.0
max_height: 10.0
angle_min: -1.5708 # -M_PI/2
angle_max: 1.5708 # M_PI/2
angle_increment: 0.00436717644334
scan_time: 0.3333
range_min: 0.1
range_max: 30.0
use_inf: false
# Concurrency level, affects number of pointclouds queued for processing and number of threads used
# 0 : Detect number of cores
# 1 : Single threaded
# 2->inf : Parallelism level
concurrency_level: 0
</rosparam>
</node>
eg: of scan output
header:
seq: 530
stamp:
secs: 435
nsecs: 155000000
frame_id: rrbot/camera_frame
angle_min: -1.57079994678
angle_max: 1.57079994678
angle_increment: 0.00436717644334
time_increment: 0.0
scan_time: 0.333299994469
range_min: 0.10000000149
range_max: 30.0
ranges: [31.0, 31.0, 31.0, 31.0, 31.0, 31.0, 31.0, 31.0, 31.0, 31.0, 31.0, 31.0, 31.0, 31.0, 31.0, 31.0, 31.0, 31.0, 31.0, 31.0, 31.0, 31.0, 31.0, 31.0, 31.0, 31.0, 31.0, 31.0, 31.0, 31.0, 31.0, 31.0, 31.0, 31.0, 31.0, 31.0, 31.0, 31.0, 31.0, 31.0, 31.0, 31.0, 31.0, 31.0, 31.0, 31.0, 31.0, 31.0, 31.0, 31.0, 31.0, 31.0, 31.0, 31.0, 31.0, 31.0, 31.0, 31.0, 31.0, 31.0, 31.0, 31.0, 31.0, 31.0, 31.0, 31.0, 31.0, 31.0, 31.0, 31.0, 31.0, 31.0, 31.0, 31.0, 31.0, 31.0, 31.0, 31.0, 31.0, 31.0, 31.0, 31.0, 31.0, 31.0, 31.0, 31.0, 31.0, 31.0, 31.0, 31.0, 31.0, 31.0, 31.0, 31.0, 31.0, 31.0, 31.0, 31.0, 31 ...add a comment

