
Problem launching pointcloud to laserscan
I am not able to launch the pointcloud to laserscan. I did this following steps:
1)launched the openni_camera by typing roslaunch openni_camera openni_node.launch
2)launched the pointcloud to laserscan by typing roslaunch pointcloud_to_laserscan kinect_laser.launch
3)ran rviz by typing rosrun rviz rviz
I am able to see the point cloud but I am not able to see the laser_scan. I was referring to this question,http://answers.ros.org/question/417/how-to-setup-pointcloud_to_laserscan. I am supposed to see /scan topic but i am not able to see it.
Am i supposed to change /openni_depth_frame?
Or what steps i shld take? Any suggestions?
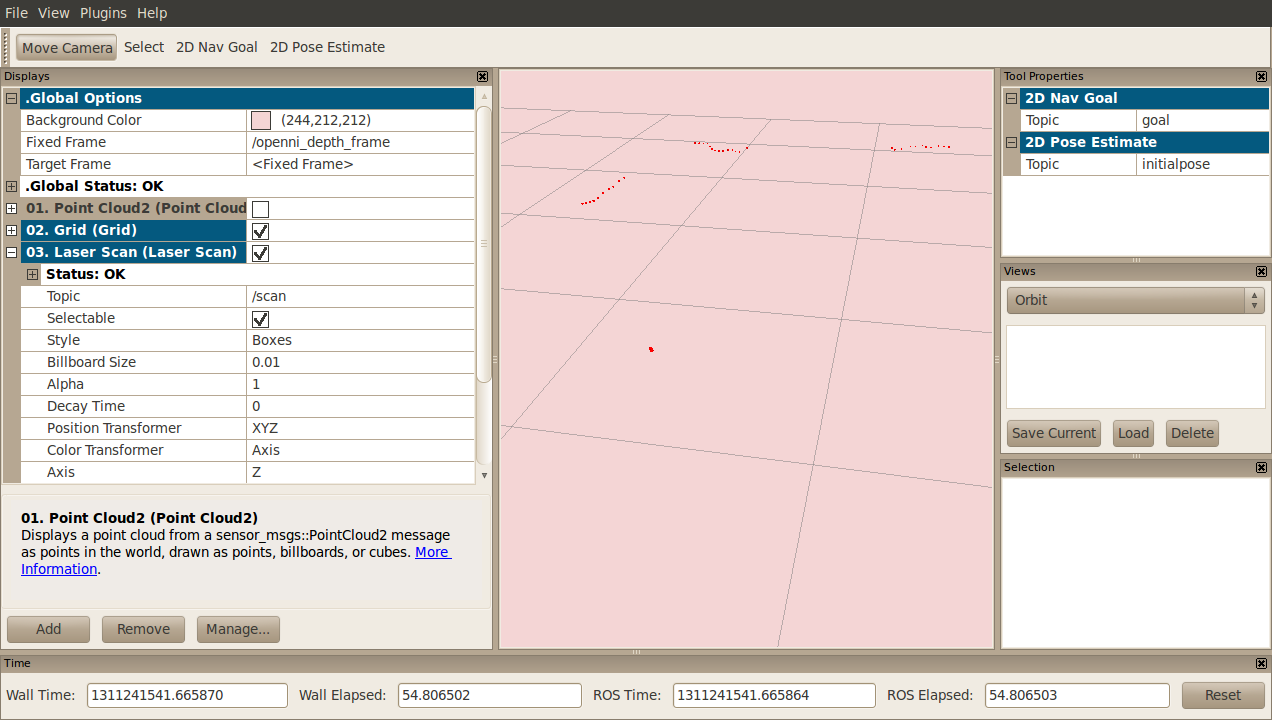
Just like to check with you all.. is this sometime like this i should get?C:\fakepath\Screenshot-RViz-1.png
Comments
yep this is what pointcloud_to_laserscan should do. If with "don't get the whole plane" you mean construct a map using the laser scan information you'lll like to read the gmapping tutorials.
what i am supposed to get is a set of points not a laser scan(or a plane).Am i right to say that?
add a comment

{kind=link}