
move_base and object manipulation
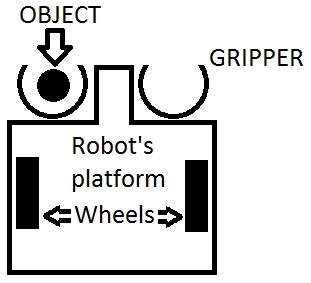
We have a square-shaped differential drive robot with two grippers installed at its corners. We want to use it for gripping cylinder-like objects in a relatively narrow space environment. The problem is that move_base is able only to construct and follow path from the center of the robot to any point, as far as I know, but not from robot's gripper to the object. Is there any way to change the behavior of move_base or use Moveit! with diff drive robot?
add a comment

