p2os_urdf pioneer3dx bug
Hello,
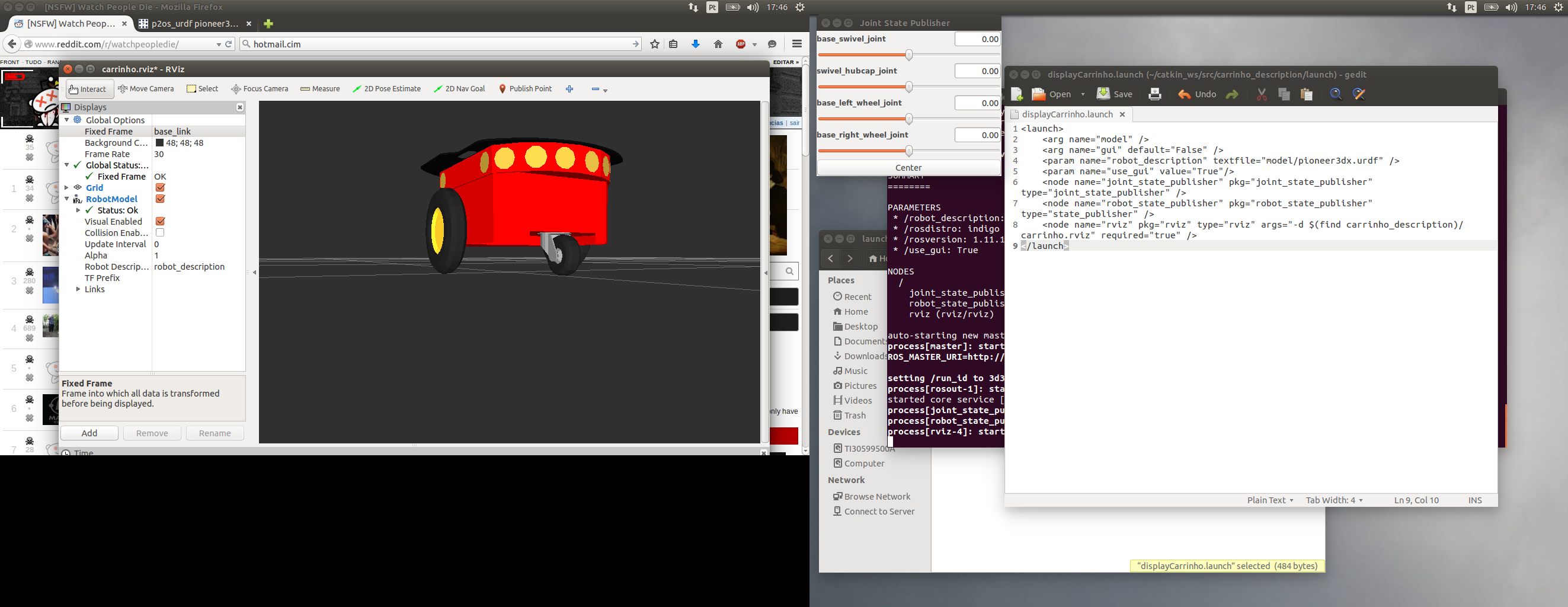
I'm trying to simulate a pionner like this one (pionner3dx), but when I run the launch file in the package p2os_urdf. pioneer3dx_urdf.launch I get a bugged robot. The wheel is out of place. I think there is a bad definition on the swife joint. Is probably out of place.
I get he following robot in Rviz.

Paulo.
add a comment