
pcl_ros pointcloud_to_pcd using kinect gives red patches in the .pcd file

Hi,
I am trying to extract the point cloud2 topic from a kinect and save it as a PCD file. I was following the tutorials from http://wiki.ros.org/pcl_ros to convert a sensor_msgs/PointCloud2 topic to a .pcd file. I found the section 4.5 pointcloud_to_pcd in that link to be useful in this case.
I ran :
roslaunch openni2_launch openni2.launch depth_registration:=true
followed by :
rosrun pcl_ros pointcloud_to_pcd input:=/camera/depth_registered/points
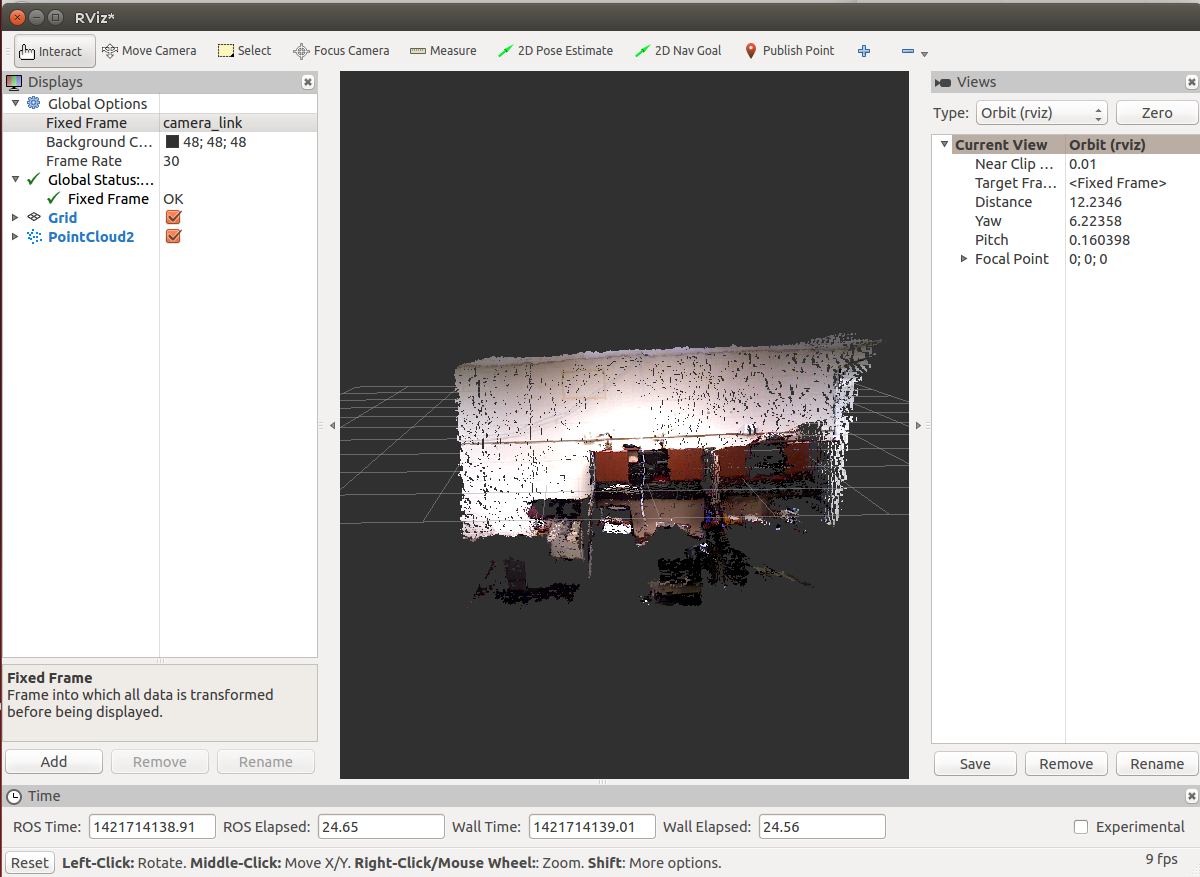
However, when I visualized the resulting pcd file using pcl_viewer I saw numerous red patches which were not present when I was visualizing the pointcloud in rviz. I'm fairly new to ROS at this point , so I'm not really sure where these red patches are coming from.
Here are the pictures of the two sample point clouds for reference(I have low karma so I am uploading it on imgur)
- Point cloud (camera/depth_registered/points) in rviz: http://i.imgur.com/X4U1yE1.png
- Point cloud in saved pcd file using pcl_viewer : http://i.imgur.com/pvNcraQ.png
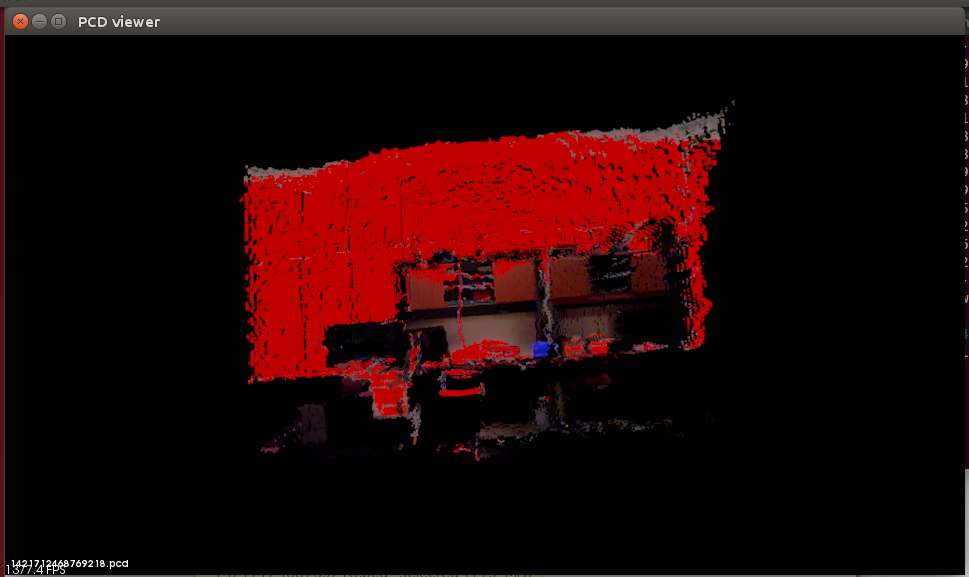
As seen from the first picture, the kinect seems to be working fine, however the pcd file is missing some of the color information. My Ubuntu Distribution is Ubuntu 14.04 and my ROS version is indigo. My graphics card is Nvidia GTX 860 and my processor is Intel® Core™ i7-4710HQ CPU @ 2.50GHz × 8 . Any help in this matter would be appreciated.

{kind=link}
{kind=link}