
urdf Moveit articulation robot
I wanna ask you a simple question about where the articulation axis is defined ? or must be defined ? in 'stl' files or in urdf ?
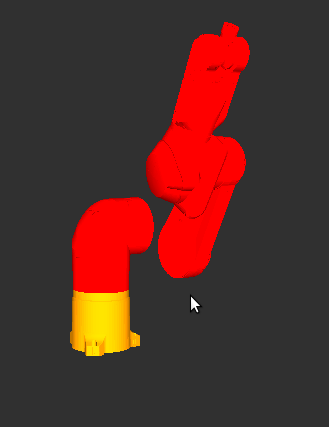
This is from my urdf file
<!-- =================================================================================== -->
<robot name="staubli_tx60">
<link name="bt">
<visual>
<origin rpy="0 0 0" xyz="0 0 0"/>
<geometry>
<mesh filename="file:///meshes/tx60/bt.stl"/>
</geometry>
<material name="">
<color rgba="1.0 0.608 0 1"/>
</material>
</visual>
<collision>
<origin rpy="0 0 0" xyz="0 0 0"/>
<geometry>
<mesh filename="file:///meshes/tx60/bt.stl"/>
</geometry>
</collision>
</link>
<joint name="joint_1" type="revolute">
<origin rpy="0 0 0" xyz="0 0 0"/>
<parent link="bt"/>
<child link="at1"/>
<axis xyz="0 0 1"/>
<limit effort="0" lower="-2.967060" upper="2.967060" velocity="2.88"/>
</joint>
<link name="at1">
<visual>
<origin rpy="0 0 0" xyz="0 0 0"/>
<geometry>
<mesh filename="file:///meshes/tx60/at1.stl"/>
</geometry>
<material name="">
<color rgba="1.0 0.608 0 1"/>
</material>
</visual>
<collision>
<origin rpy="0 0 0" xyz="0 0 0"/>
<geometry>
<mesh filename="file:///meshes/tx60/at1.stl"/>
</geometry>
</collision>
</link>
<joint name="joint_2" type="revolute">
<parent link="at1"/>
<child link="at2"/>
<origin rpy="0 0 0" xyz="0 0 0"/>
<axis xyz="0 1 0"/>
<limit effort="0" lower="-2.4" upper="2.4" velocity="2.62"/>
</joint>
<link name="at2">
<visual>
<origin rpy="0 0 0" xyz="0 0 0"/>
<geometry>
<mesh filename="file:///meshes/tx60/at2.stl"/>
</geometry>
<material name="">
<color rgba="1.0 0.608 0 1"/>
</material>
</visual>
<collision>
<origin rpy="0 0 0" xyz="0 0 0"/>
<geometry>
<mesh filename="file:///meshes/tx60/at2.stl"/>
</geometry>
</collision>
</link>
add a comment

