
edit the package navigation
Hello !
I used navigation package in my robot , but now I want to modify some code in the base_local_planner of navigation . I know that I cannot edit the source file install in /opt/ros/hydro/share , so I downloaded package here .
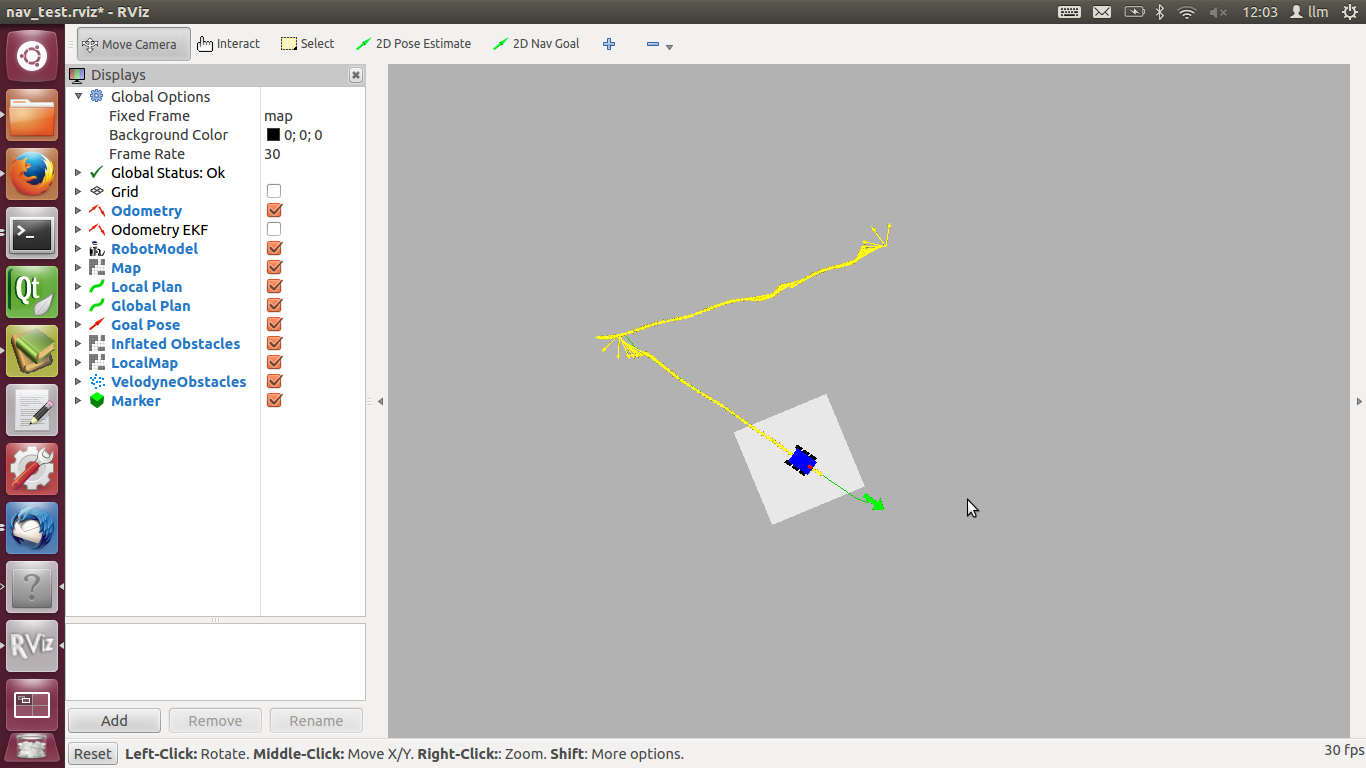
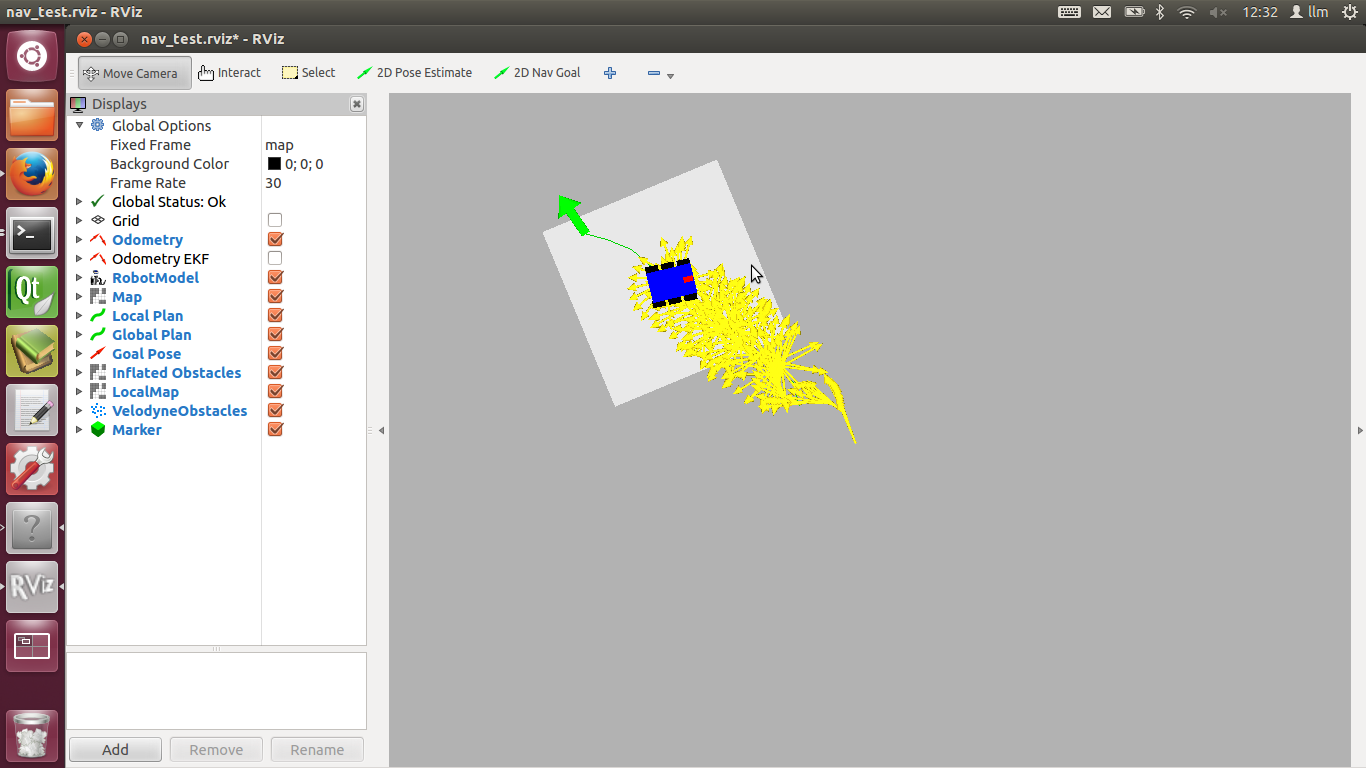
Before I edit the code , I ran my simulation robot in rviz and give a 2D navigation to it . I ran the $rospack find move_base to ensure that it link to the package I have download , and it shows /home/llm/chaoying/src/navigation-hydro-devel.2/move_base . But the robot went a wrong way and can not arrive the goal which is not same when I used the original move_base in /opt/ros/hydro/share .
I want to know why ? Are the two package's code different ?
add a comment

