
How to solve moveit planning scene's PR2 robot position inconsistency?
For example, I add a table and a cup before PR2.
This is the picture of planning scene:
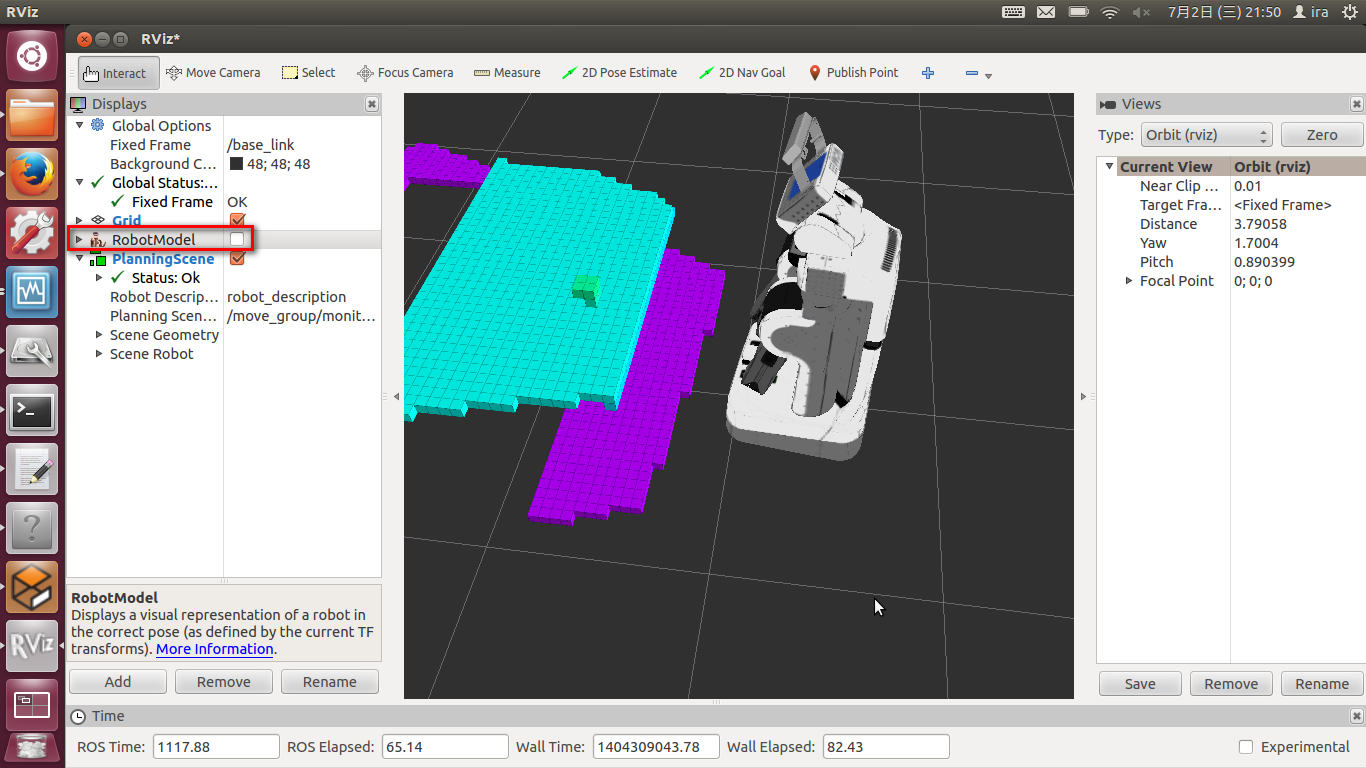
This is the picture that show PR2 robot model.
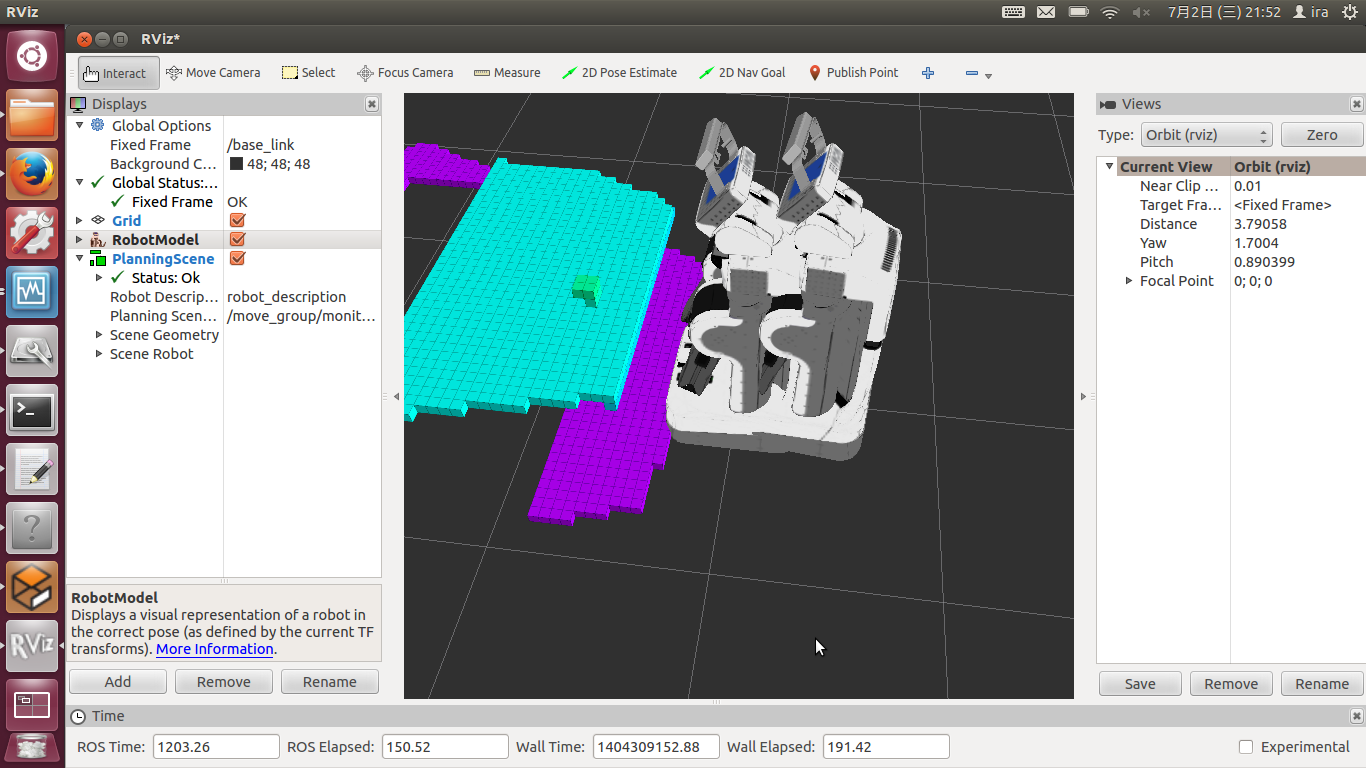
It can easily found that two PR2 in different position.
Is it normal? Why?
If not, how to solve it?
Thank you~
add a comment

