
about a way to change default global planner

Hello, Everyone might think that this question is same as this article ( http://answers.ros.org/question/39347... ). Actually, as following the answer, I edited my move_base.launch.xml like this.
<node pkg="move_base" type="move_base" respawn="false" name="move_base" output="screen">
<param name="base_global_planner" value="carrot_planner/CarrotPlanner" />
<rosparam file="$(find turtlebot_navigation)/param/move_base_params.yaml" command="load" />
<rosparam file="$(find turtlebot_navigation)/param/costmap_common_params.yaml" command="load" ns="global_costmap" />
<rosparam file="$(find turtlebot_navigation)/param/costmap_common_params.yaml" command="load" ns="local_costmap" />
<rosparam file="$(find turtlebot_navigation)/param/local_costmap_params.yaml" command="load" />
<rosparam file="$(find turtlebot_navigation)/param/global_costmap_params.yaml" command="load" />
<rosparam file="$(find turtlebot_navigation)/param/eband_planner_params.yaml" command="load" />
<param name="base_local_planner" value="eband_local_planner/EBandPlannerROS" />
<param name="global_costmap/map_topic" value="$(arg map_topic)" />
<remap from="cmd_vel" to="navigation_velocity_smoother/raw_cmd_vel"/>
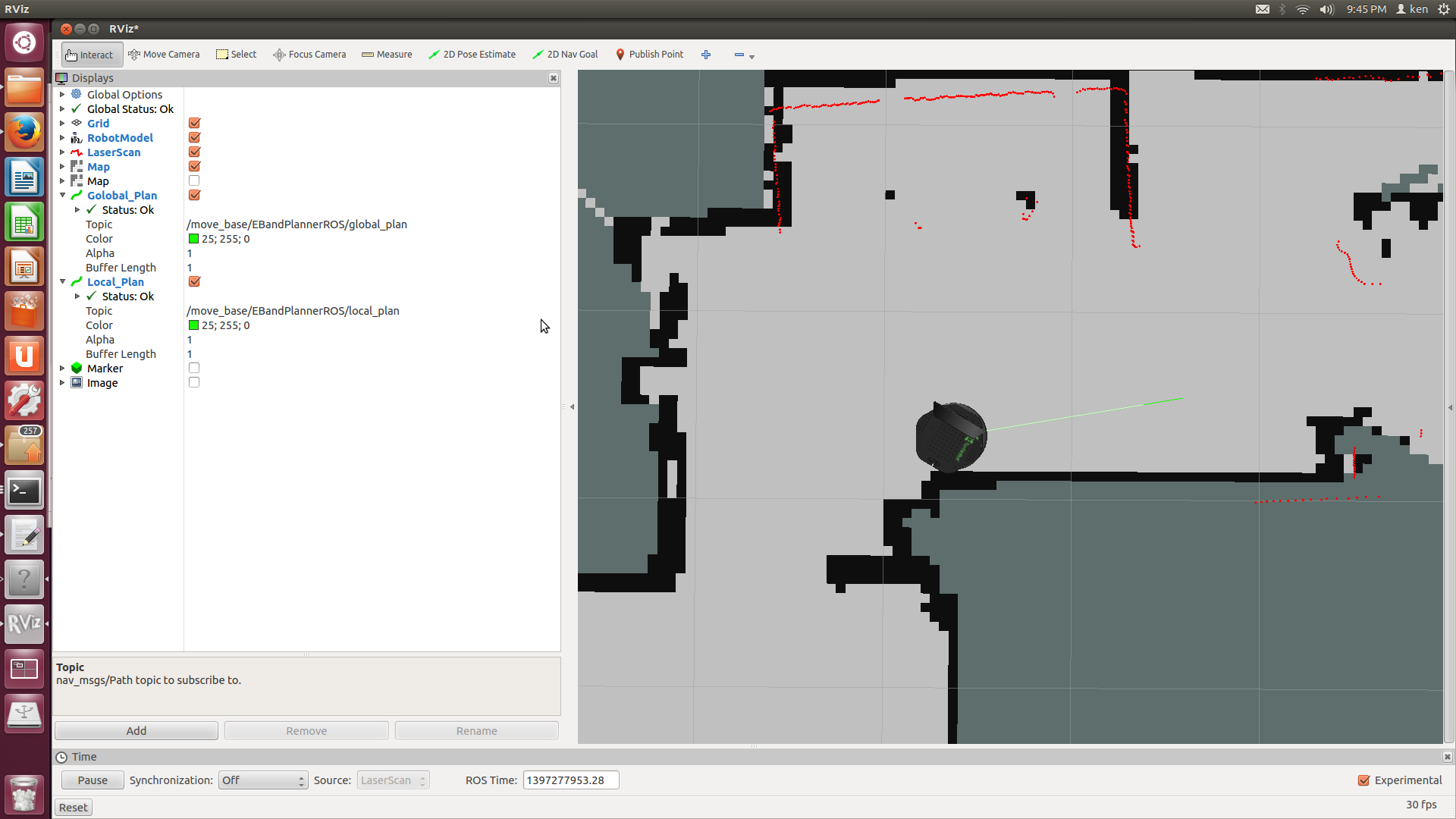
</node> The result is following. As showing, Global plan set to elastic band. Elastic band is a local planner, not a global planner. My experiment environment is a turtlebot2 as a target, Hydro as ROS dist on Ubuntu 12.04.
[ INFO] [1397253785.373263757]: Global plan set to elastic band for optimization
[ INFO] [1397253785.374082648]: TrajectoryController: Goal reached with distance 0.00, 0.11 (od = -0.02); sending zero velocity
Could anybody tell me some information to change a global planner? Thank you in advance!
I show you an additional information. Rviz just seems to display a eband_local_planner as global & local planner.

I should have read this article on this web ( http://wiki.ros.org/navigation/Tutorials/Writing%20A%20Global%20Path%20Planner%20As%20Plugin%20in%20ROS)
The reason that another planner isn't displayed on Rviz relate to yaml file?